




























Chapter 1: System connections
3
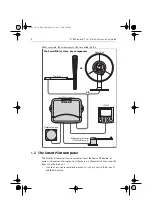
• it is the central distribution point for the autopilot system, with terminals to
take power from the boat’s distribution panel and inputs/outputs for all other
autopilot components
• it has inputs/outputs for SeaTalk and NMEA so you can connect it to Rayma
rine and other manufacturer’s equipment.
SmartPilot Gyro plus
The S1 TillerPilot has a built in Gyro (yaw sensor) which measures the boat’s rate
of turn. This allows the autopilot to operate without a rudder reference unit.
The S1 WheelPilot does not contain a builtin Gyro. This can be upgraded with a
dealerfitted Gyro plus unit.
SmartPilot
Version
Supply
voltage
Builtin Gyro?
S1 TillerPilot
12 V
Yes
S1 WheelPilot
12 V
No
(available as dealer fitted upgrade)
81282_1.book Page 3 Monday, October 2, 2006 1:58 PM







































































