





























Manual MCD
+
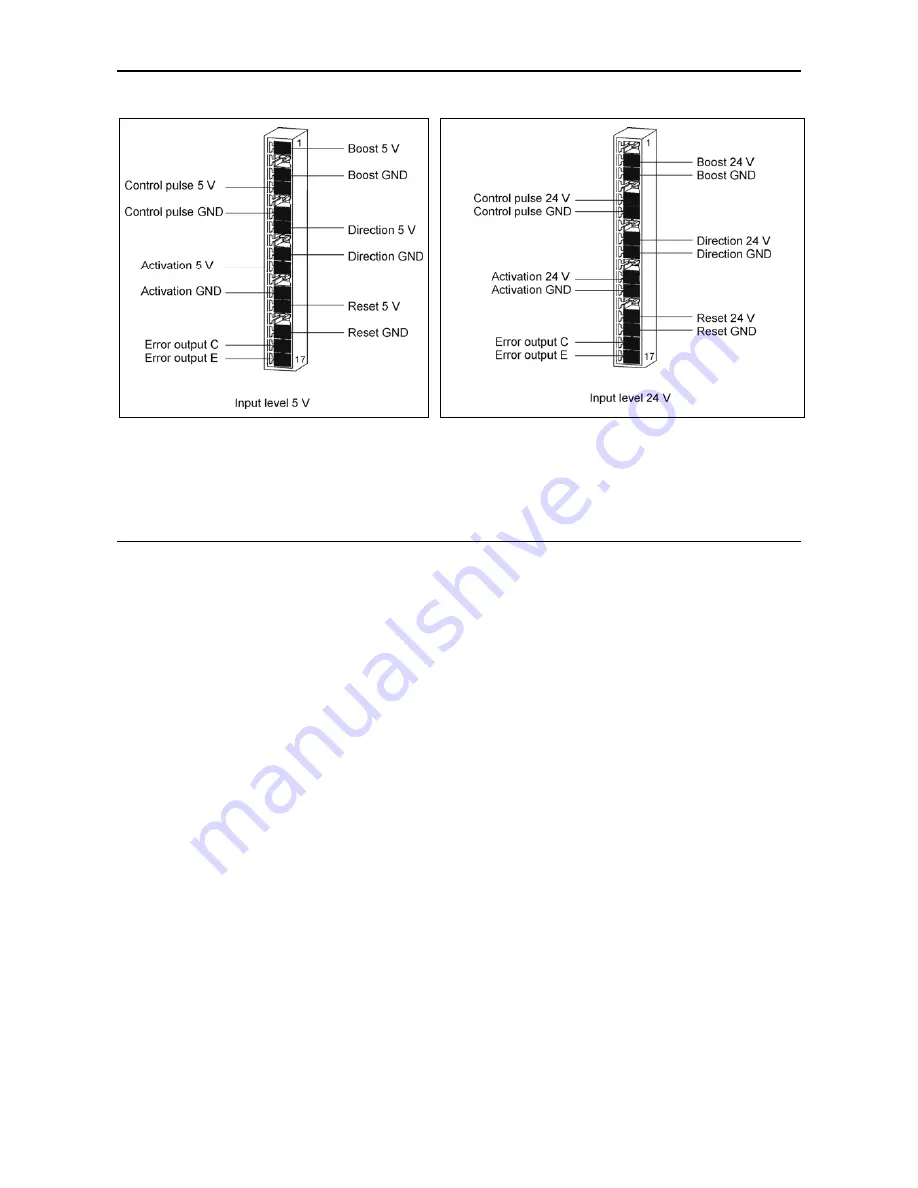
Fig. 25:
Input level 5 V or 24 V connection
7.1.3 Control Pulse Input
Maximum step frequency: 500 kHz
Minimum pulse width: 1 µs
The step is done with the rising flank of the control pulse.
The control pulse sequency must not suddenly start or stop, if the control pulse frequency
is higher than the start/stop frequency*
)
of the motor. Mispositioning of the drive would be
the result.
*
)
The start/stop frequency is defined as that frequency, from which a stepper motor can start from
standstill without losing a step. Typical values for the start/stop frequency are 200 to 2000 Hz.
The exact value depends on the load torque and the load inertia of the motor shaft.
If the motor is to be operated above the start/stop frequency range, the indexer has to
generate frequency ramps to accelerate and decelerate the motor.
Current delay time:
After the last control pulse the stop current is activated after a waiting time. The waiting
time after the last control pulse until the change to the stop current is called current delay
time.
In Rotary switch mode the current delay time is set to 40 ms default value.
In ServiceBus mode the current delay time is programmed as parameter and saved in the
MCD (see appendix A4).
MA 2102-A005 GB
28







































































