

























4 0
z
ZETA6104 Installation Guide
response to a sudden change that we impose on the
system, such as ÒAccelerate to VelocityÓ or ÒStop.Ó
Several problems are associated with ringing. It can cause
audible noise; the motor must have a margin of extra
torque to overcome the ringing; and longer settling times
can decrease throughput.
To eliminate these problems, system designers use
damping to force the ringing to decay quickly. Inertial
dampers have been used as components in passive
damping methods. Accelerometers, encoders, and
tachometers have been used as components in active
damping methods. These devices can have the unwanted
effect of limiting performance, adding complexity, and
increasing cost.
The ZETA6104 has internal electronics that can damp
ringing transients, and cause them to decay quickly. No
external devices are necessary.
Damping in the ZETA6104
The ZETA6104 has three different circuits that can damp
resonance and ringing.
Anti-Resonance
Ð General-purpose damping circuit.
The ZETA6104 ships from the factory with anti-
resonance enabled. No configuration is necessary.
Anti-resonance provides aggressive and effective
damping.
Active Damping
Ð Extremely powerful damping
circuit. The ZETA6104 ships from the factory with
active damping disabled. You must use the
DACTDP
command to enable active damping and optimize it for a
specific motor size and load (see procedure on page 26).
Electronic Viscosity
Ð Provides passive damping
at lower speeds. The ZETA6104 ships with electronic
viscosity disabled. You must use the
DELVIS
command to enable electronic viscosity, and optimize
it for a specific application (see procedure on page 29).
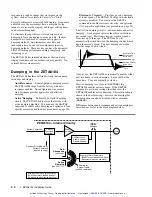
The first two damping circuitsÑanti-resonance and active
dampingÑwork at speeds greater than three revolutions
per second (rps). Electronic viscosity works at speeds
from rest up to three rps. The ZETA6104 will
automatically switch between the damping circuits, based
upon the motorÕs speed. The next drawing shows the
effective range of each circuit.
Time
Velocity
Anti-Resonance or
Active Damping
(above 3 rps)
Electronic Viscosity
(below 3 rps)
3 rps
3 rps
Above 3Êrps, the ZETA6104 automatically enables either
anti-resonance or active dampingÑbut not both at the
same time. They are mutually exclusive.
If active damping is set to zero (
DACTDP¯
), the
ZETA6104 enables anti-resonance. If the
DACTDP
command is set to any setting other than zero, the
ZETA6104 enables active damping. This relationship is
shown in the next drawingÑnotice in the drawing that
anti-resonance can also be disabled with a command
(
DAREN¯
).
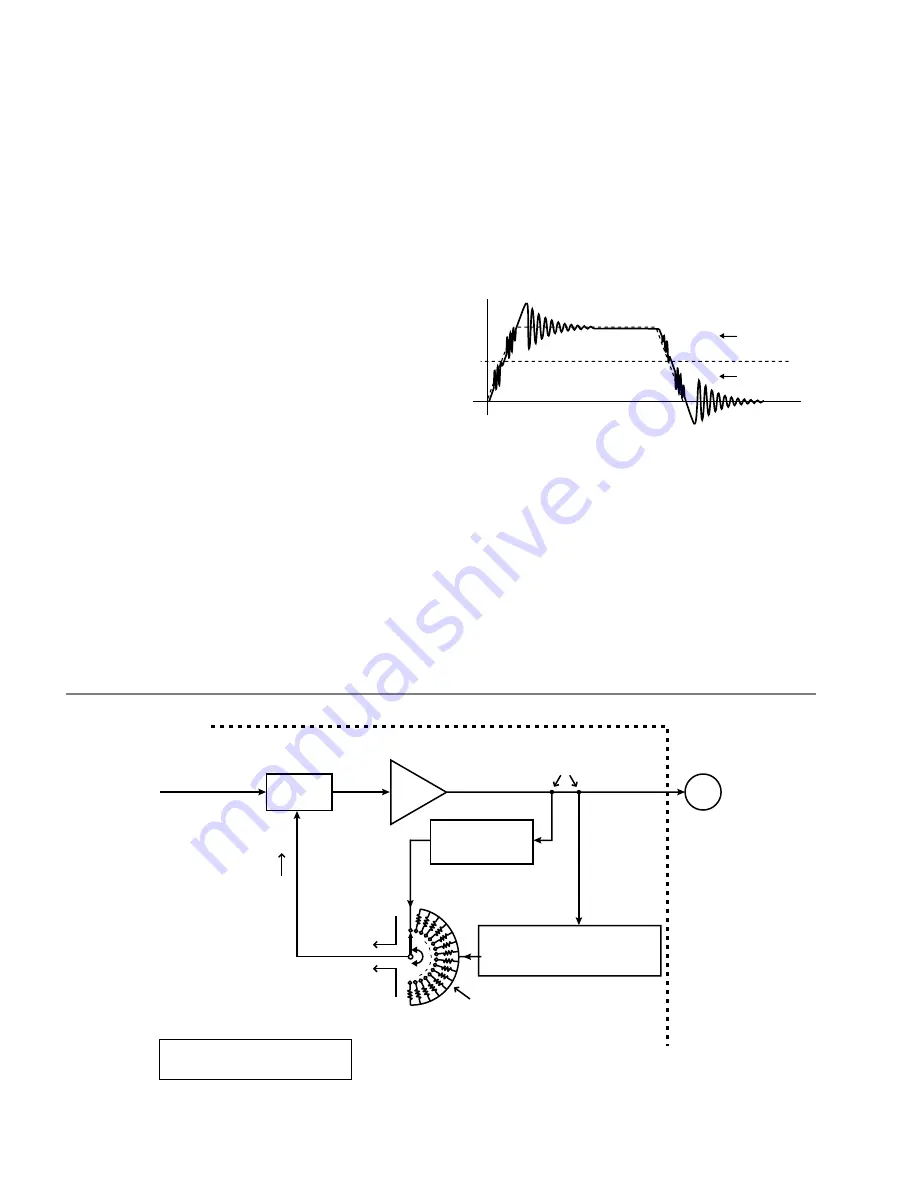
Differences between anti-resonance and active damping are
described next; refer to the block diagram below.
Drawing shows factory default settings:
¥
Anti-Resonance enabled (
DAREN1
)
¥
Active Damping disabled (
DACTDP¯
)
ZETA6104 Ð Internal Circuitry
Motor
Current Command
Current
Command
Modulator
Power
Amplifier
Motor
Terminal
Voltages
Anti-
Resonance
(
DACTDP¯
)
Active
Damping
(
DACTDP1-15
)
Scaling for Motor Parameters:
¥ Static Torque (
DMTSTT
command)
¥ Inductance (
DMTIND
command)
Anti-Resonance
Enable:
DAREN1
Disable:
DAREN¯
Scaling for
System Inertia
(
DACTDP
command)
Dynamic Error Modulates
Current Command
(above 3 rps only)
1 2
14
15
0
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Summary of Contents for Compumotor ZETA6104
Page 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...





















































