

























3 4
z
ZETA6104 Installation Guide
Troubleshooting Basics
When your system does not function properly (or as you expect it to operate), the first thing
that you must do is identify and isolate the problem. When you have accomplished this, you
can effectively begin to resolve the problem.
The first step is to isolate each system component and ensure that each component functions
properly when it is run independently. You may have to dismantle your system and put it
back together piece by piece to detect the problem. If you have additional units available, you
may want to exchange them with existing components in your system to help identify the
source of the problem.
Determine if the problem is mechanical, electrical, or software-related. Can you repeat or re-
create the problem? Random events may appear to be related, but they are not necessarily
contributing factors to your problem. You may be experiencing more than one problem. You
must isolate and solve one problem at a time.
Log (document) all testing and problem isolation procedures. You may need to review and
consult these notes later. This will also prevent you from duplicating your testing efforts.
Once you isolate the problem, refer to the problem solutions contained in this chapter. If the
problem persists, contact your local technical support resource (see
Technical Support
below).
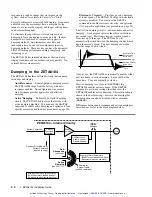
Reducing Electrical Noise
Refer to the guidelines on page 19. General information on reducing electrical noise can be
found in the Engineering Reference section of the Parker Compumotor/Digiplan catalog.
Appendix D (page 49) provides guidelines on how to install the ZETA6104 in a manner most
likely to minimize the ZETA6104Õs emissions and to maximize the ZETA6104Õs immunity
to externally generated electromagnetic interference.
Diagnostic LEDs
POWER
.............
On (green) if 120VAC connected. Off if no power.
STEP
.................
Flashes on (green) with each pulse sent to the motor. Off if no pulses.
OVER TEMP
........
On (red) if internal sensor reaches 131
°
F (55
°
C). Off = O.K.
MOTOR FAULT
....
On (red) if there is a short in the motor windings, if the motor cable is
disconnected or shorted, or if the INTERLOCK jumper on the MOTOR
connector is removed or extended. Off = O.K.
Test Options
¥
Test Panel
. Motion ArchitectÕs Panel Module allows you to set up displays for testing
system I/O and operating parameters. Refer to the
Motion Architect User Guide
for details.
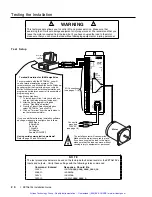
¥
Hardware Test Procedure
(see pages 20-21).
¥
Motion Test
. A test program is available to verify that the ZETA6104 is sending
pulses to the motor and that the motor is functioning properly. The test program can be
initiated by issuing the
TEST
command over the serial interface, or by accessing the
RP240
TEST
menu (see
6000 Series ProgrammerÕs Guide
for RP240 menu structure).
WARNING
The
TEST
program causes the end-of-travel limits to be ignored. If necessary, disconnect
the load to ensure the test moves do not damage your equipment or injure personnel.
Technical Support
If you cannot solve your system problems using this documentation, contact your local
Automation Technology Center (ATC) or distributor for assistance. If you need to talk to our
in-house application engineers, please contact us at the numbers listed on the inside cover of
this manual. (These numbers are also provided when you issue the
HELP
command.)
NOTE
: Compumotor maintains a BBS that contains the latest software upgrades and late-
breaking product documentation, a FaxBack system, and a tech support email address.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
Summary of Contents for Compumotor ZETA6104
Page 45: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 49: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 53: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...
Page 63: ...Artisan Technology Group Quality Instrumentation Guaranteed 888 88 SOURCE www artisantg com...





















































