




























➁
Installation
39
CAUTION
For initial tuning with an SM or NeoMetric motor, set peak current DIP switches at twice
the motor’s continuous rated current, or less. Otherwise, high peak currents during instabil-
ity may cause motor overheating and damage.
To avoid damage, we recommend a tuning procedure that may differ from methods you
have used before. Instability sometimes
does occur
during tuning; to avoid the damaging
currents that instability can cause, reduce the peak current
before
you begin the tuning
process. Then, as you refine your tuning values, you can gradually increase peak current.
These steps are included in the tuning procedure described below.
Preparing the System for Tuning
Before applying power and tuning the drive, complete the following steps.
Setup Procedure:
➀
Heatsink your motor
: This is especially important in temporary “bench top” procedures.
SM Motors dissipate excess heat through their faceplate; to ensure proper motor cooling, the
faceplate must be mounted to a heatsink.
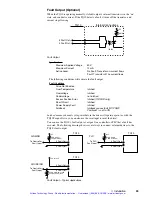
➁
Disable Integral Gain
(optional)
:
If you do not need integral gain in your application,
connect a wire from
I-GAIN OFF
to ground; this will permanently disable integral gain. If you
intend to use integral gain, tuning will be simplified if you disable it now, and re-enable it in
Step 6
of the tuning procedure.
➂
Set up the Velocity Monitor
(optional)
:
Connect an oscilloscope to the velocity monitor
output, as described earlier in the
Inputs and Outputs
section. Its use is optional—however,
because the velocity monitor clearly shows your system’s response when you adjust the
potentiometers, we recommend using it.
➃
Set Potentiometers to their Default Values:
The tuning potentiometers were set at default
values when the TQ10SD shipped from the factory. If yours is a new unit, skip this step and
proceed to Step 5. Otherwise, follow this procedure to return the settings to their default
values:
1. Turn each potentiometer 12 turns counterclockwise to zero it.
2. Turn the proportional gain potentiometer 3 turns clockwise.
3. Leave the integral gain potentiometer at zero.
4. Turn the derivative gain potentiometer 4
1
⁄
2
turns clockwise.
These settings will provide a stable but “mushy” response with most motors and light loads.
➄
Reduce peak current
: Using the drive’s DIP switches, set the peak current at a level that is
less than twice the motor’s continuous current rating.
•
4.4 amps for SM motors with
-A
windings
•
7.4 amps for SM motors with
-B
windings, N0921F
•
6.0 amps for N0701D and N0702E motors
•
8.9 amps for N0702F, N0701F, N0703F, N0704F
•
10.0 amps for N0703G, N0704G, N0921G, N0922G
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































