





























16
iX3 565 Robot with EtherCAT User’s Manual
22792-000 Rev. A
1.3 Robot Options
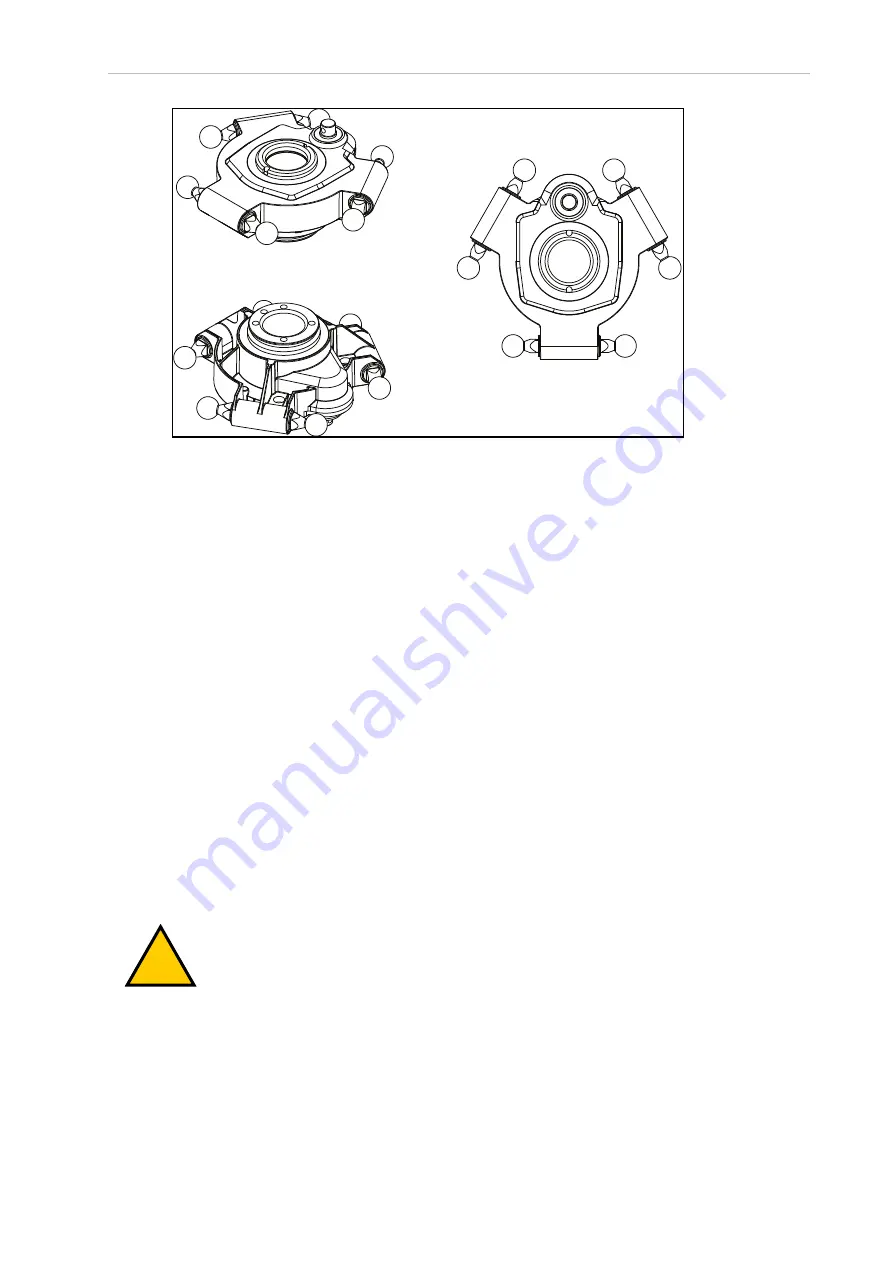
Figure 1-6. 4 Axis Robot Platform
Robot Motions and Obstacles
Considerations for robot motions and obstacles are described below.
Robot Motions
Joint-interpolated motion is not possible with the robot because the positions of all the joints
must always be coordinated in order to maintain the connections to the platform. As a result,
the control system automatically performs a straight-line motion when a joint-interpolated
motion request is encountered.
Containment Obstacle
The work space of the robot is defined by an inclusion obstacle. This is done because, unlike
other robots, joint limits are not meaningful in defining the work space. The system defines a
cylindrical shape tapered at the bottom as a containment obstacle as the work envelope. Other
obstacles can be defined within this area. Refer to the
Sysmac Studio Robot Integrated System
Building Function with Robot Integrated CPU Unit Operation Manual (Cat. No. W595)
for more
information.
1.3 Robot Options
This section describes the various options available for the robot.
!
WARNING:
Ensure all optional equipment is installed properly and securely
fastened to the robot before operation. Failure to do so may result in personal
injury or equipment damage.
IO Blox
IO Blox units extend the robot's capabilities by providing expandable I/O capacity.