



























Chapter 1: Introduction
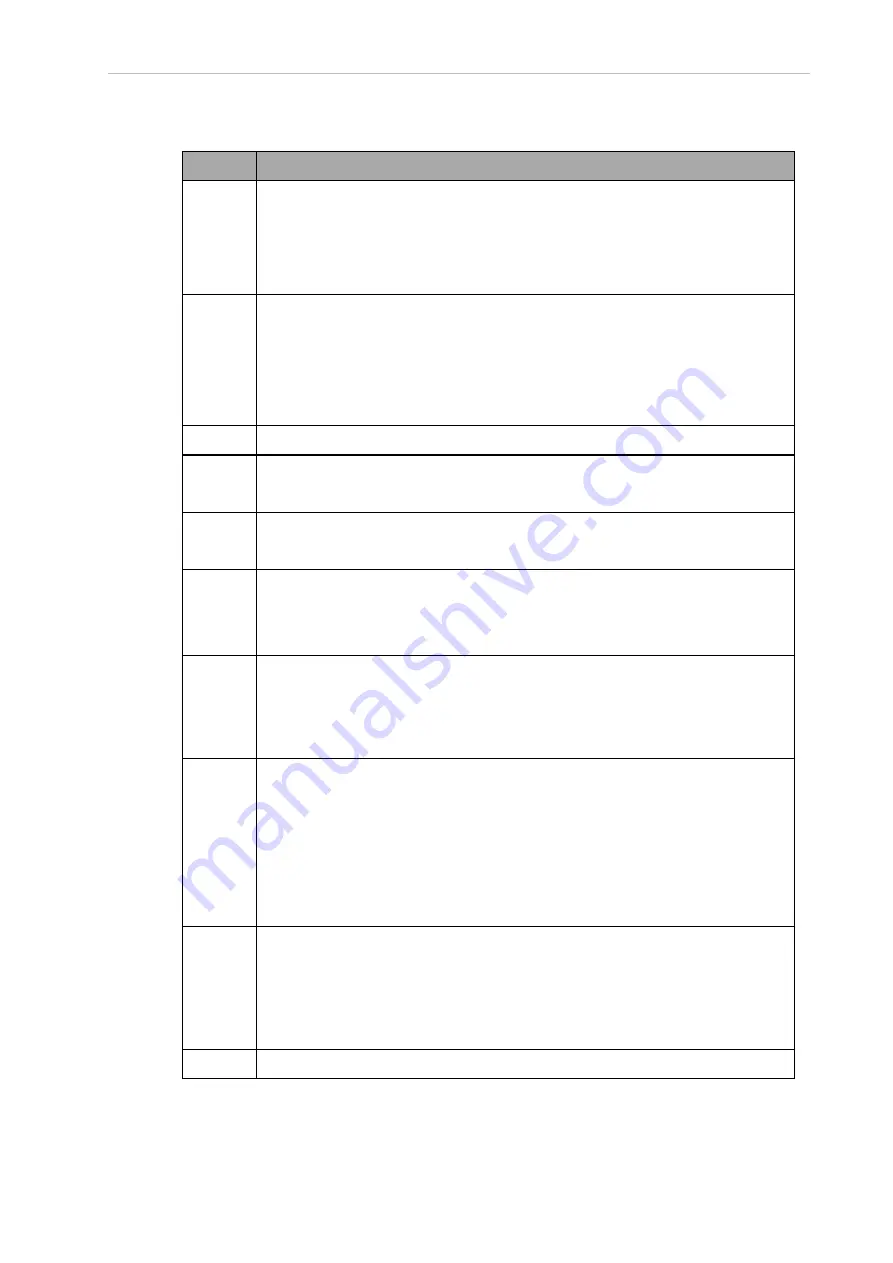
Table 1-2. iCS-ECAT Robot Interface Panel Descriptions
Item
Description
A
AC Power Supply Connector
Used for connecting 200 to 240 VAC, single-phase input power to the robot.
A connector is provided with the robot.
Refer to Connecting the 24 VDC Cable to the Robot on page 77
B
DC Power Supply Connector
Used for connecting the user-supplied 24 VDC power to the robot.
A connector is provided with the robot.
Refer to Connecting the 24 VDC Cable to the Robot on page 77 for more
information.
C
Ground Terminal
D
XSYSTEM Connector
Refer to Basic System Cable Layout on page 61
E
EtherCAT Ports
Used for inbound and outbound EtherCAT communications.
F
Node ID Switches
Used to set the robot's EtherCAT node ID.
Refer to Setting the EtherCAT Node ID on page 52
G
LEDs
Indicates the status of the EtherCAT connection.
Refer to EtherCAT Communications Description on page 90 for more inform-
ation.
H
4-Position Mode Switches
Used to adjust the operating mode of the robot.
Refer to Robot Control Modes on page 93 for more information.
Additional Information
: Switch 1 should remain in the NX / left
position. Functionality associated with switch 1 in the 3P / right
position is reserved for future use.
I
XBELTIO Connector
Used to connect up to
two external belt encoders and IO Blox external I/O. This
requires the XBELTIO Adapter cable
.
Refer to Basic System Cable Layout on page 61 for more information.
XBELTIO
J
XIO Connector
22792-000 Rev. A
iX3 565 Robot with EtherCAT User’s Manual
13