





























4.1 Home position registration
4.1.3
Home position registration by manual recording
This method is used to record the home position directly without referencing the program. Operate the robot
to set it.
The home position registration is not changed in tandem with any modifications made by teaching, and the
absolute position is now registered. Unlike the program reference system, a programs need not be provided
ahead of time.
Only the differences from the program reference system will be described below.
1
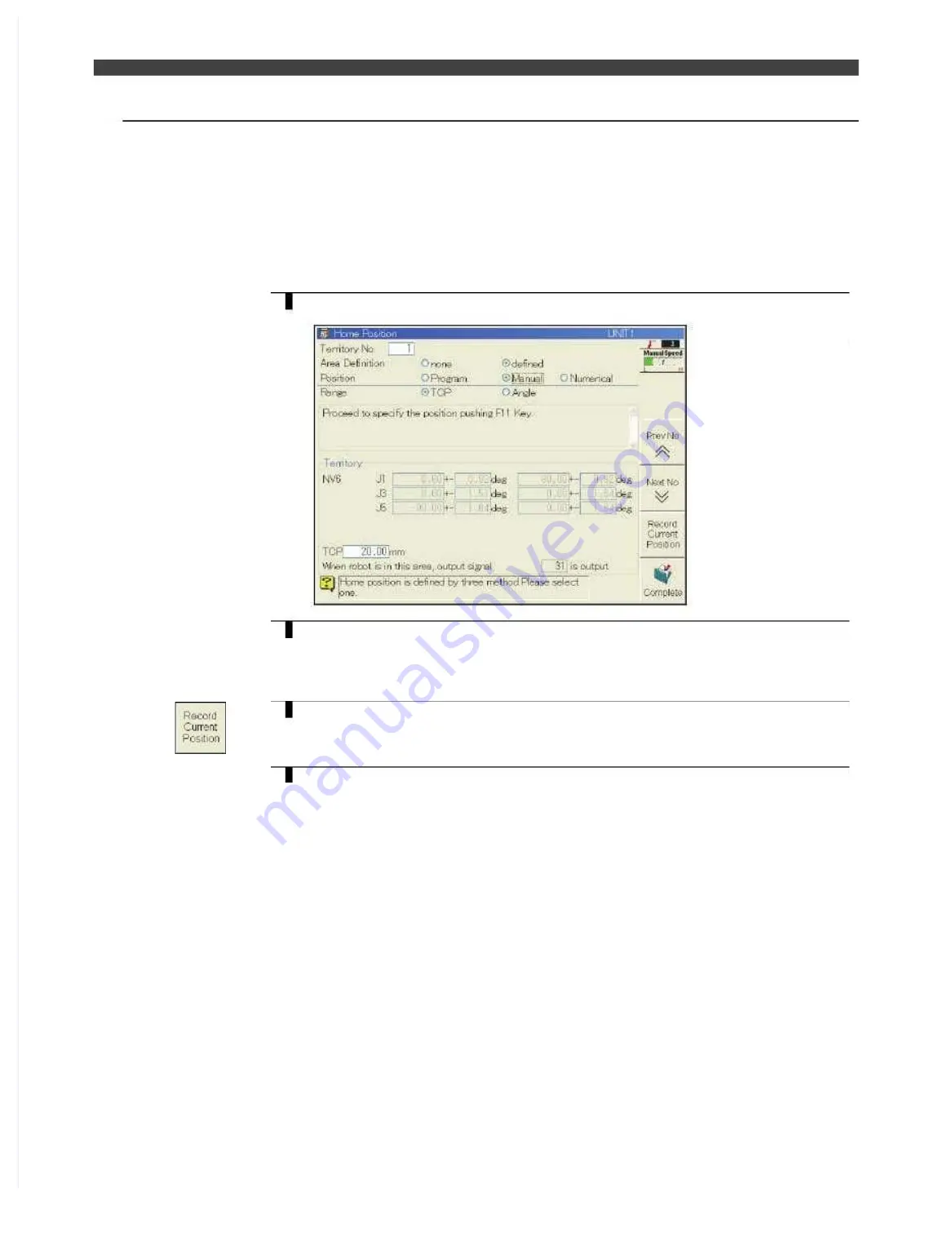
Set "Position" to "Manual."
>>The setting screen changes as shown below.
2
Turn on the motor power (servo power), and move the robot by manual
operations to the position which is to serve as the home position.
Once the position has been determined, release the enable switch.
(Alternatively, turn off the motor power.)
3
Press the <Current Record Posi.> f key.
>>The current position is read from the robot encoder, and the position data of each
axis is displayed in the center.
4
Set the "TCP" in the same w ay as with referencing the program. (The next steps
are the same.)
Summary of Contents for EZ-CFDL Series
Page 2: ......
Page 8: ...Table of Contents NOTE ...
Page 10: ...ぺージあわせのため白文字 白文字のため印刷されないなので気にしないでください 削除しないでください ...
Page 58: ...4 4Interference Territory registration NOTE ...
Page 59: ......
Page 68: ...5 4File transfer FTP server NOTE ...
Page 70: ......
Page 83: ......







































































