





























3.18Position resume setting
3.18Position resume setting
3.18.2
3.18.2
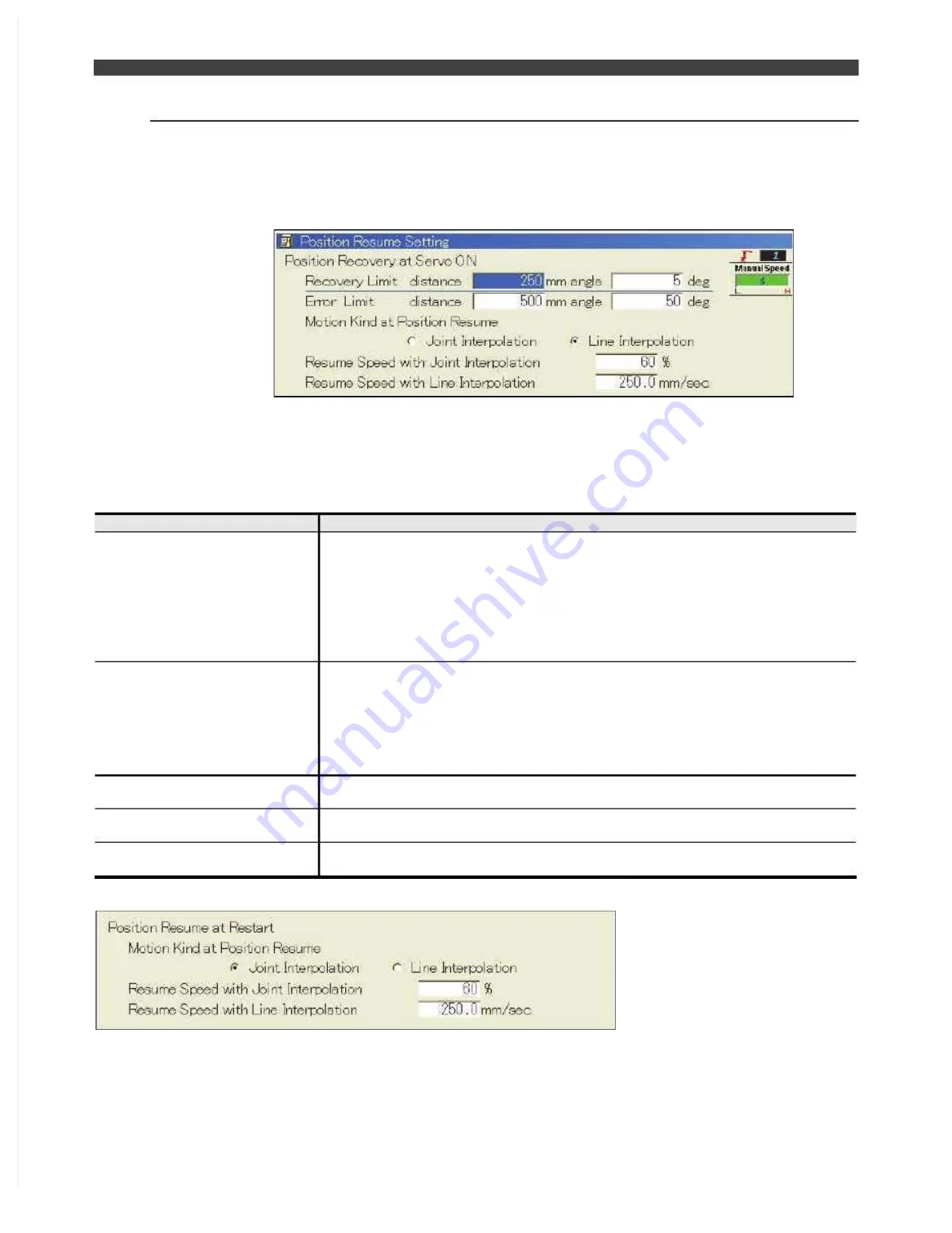
Position recovery at Servo ON
Position recovery at Servo ON
The posture at the position on the command path when the motor power is turned off is stored in the memory,
The posture at the position on the command path when the motor power is turned off is stored in the memory,
and the robot is automatically moved to return to that posture when the motor power is turned back on. This
and the robot is automatically moved to return to that posture when the motor power is turned back on. This
means that, when restart is initiated, the
means that, when restart is initiated, the same path is drawn as the one
same path is drawn as the one drawn under normal circumstances
drawn under normal circumstances. This
. This
function is also called the
function is also called the "Previous position return function."
"Previous position return function."
The differences in the position and posture between the time when the motor power is turned off and the time
The differences in the position and posture between the time when the motor power is turned off and the time
when it is turned back on are defined by the differences in the distance of the tool tip position and angle (robot
when it is turned back on are defined by the differences in the distance of the tool tip position and angle (robot
wrist posture), and whether to perform the return operation or not is set depending on the extent of these
wrist posture), and whether to perform the return operation or not is set depending on the extent of these
differences.
differences.
T
Table
able 3.18.1
3.18.1 Position Recovery
Position Recovery at
at Servo
Servo ON
ON
Setting item
Setting item
Description
Description
Recovery Limit
Recovery Limit
If both the distance and angle are within the values set here, the automatic return
If both the distance and angle are within the values set here, the automatic return
operation is performed. If the distance or
operation is performed. If the distance or the angle has exceeded the
the angle has exceeded the value set here,
value set here,
an “Information” message appears when the motor power is turned on, and the return
an “Information” message appears when the motor power is turned on, and the return
operation is not performed.
operation is not performed.
If the distance has been set t
If the distance has been set t o 0 mm, the return decision is not
o 0 mm, the return decision is not based on the distance.
based on the distance.
If the angle has been set to 0 degrees, the return decision is not based on the angle.
If the angle has been set to 0 degrees, the return decision is not based on the angle.
If both the distance and angle have been set to zero, the automatic return function
If both the distance and angle have been set to zero, the automatic return function
which is performed when the servo is turned on
which is performed when the servo is turned on is canceled.
is canceled.
Error Limit
Error Limit
If the distance or the angle has exceeded the value set here, an error is detected
If the distance or the angle has exceeded the value set here, an error is detected
when the motor power is turned on, and operation cannot be started until the error
when the motor power is turned on, and operation cannot be started until the error
reset operation is performed.
reset operation is performed.
After that, the robot cannot restart un
After that, the robot cannot restart until one of the following operations is perform
til one of the following operations is performed.
ed.
(1)
(1) Step
Step set
set
(2)
(2) Servo O
Servo ON operation in
N operation in Teach or
Teach or Playback
Playback mode
mode
(3)
(3) Power OFF
Power OFF and ON of the
and ON of the primary pow
primary power supply switc
er supply switch
h
Motion kind at Position Resume
Motion kind at Position Resume
This is used to select either joint interpolation or linear interpolation as the
This is used to select either joint interpolation or linear interpolation as the
interpolation type for the automatic return operation.
interpolation type for the automatic return operation.
Resume Speed with Joint
Resume Speed with Joint
Interpolation
Interpolation
This is used to specify the speed
This is used to specify the speed for joint interpolation.
for joint interpolation.
Resume Speed with Line
Resume Speed with Line
Interpolation
Interpolation
This is used to specify the speed
This is used to specify the speed for linear interpolation.
for linear interpolation.
The low safety speed (250 mm/sec.) is the safe speed.
The low safety speed (250 mm/sec.) is the safe speed.
(Supplement) The following parameters are not used.
(Supplement) The following parameters are not used.
Summary of Contents for EZ-CFDL Series
Page 2: ......
Page 8: ...Table of Contents NOTE ...
Page 10: ...ぺージあわせのため白文字 白文字のため印刷されないなので気にしないでください 削除しないでください ...
Page 58: ...4 4Interference Territory registration NOTE ...
Page 59: ......
Page 68: ...5 4File transfer FTP server NOTE ...
Page 70: ......
Page 83: ......





















































