





























3.5 Tool constant settings
6
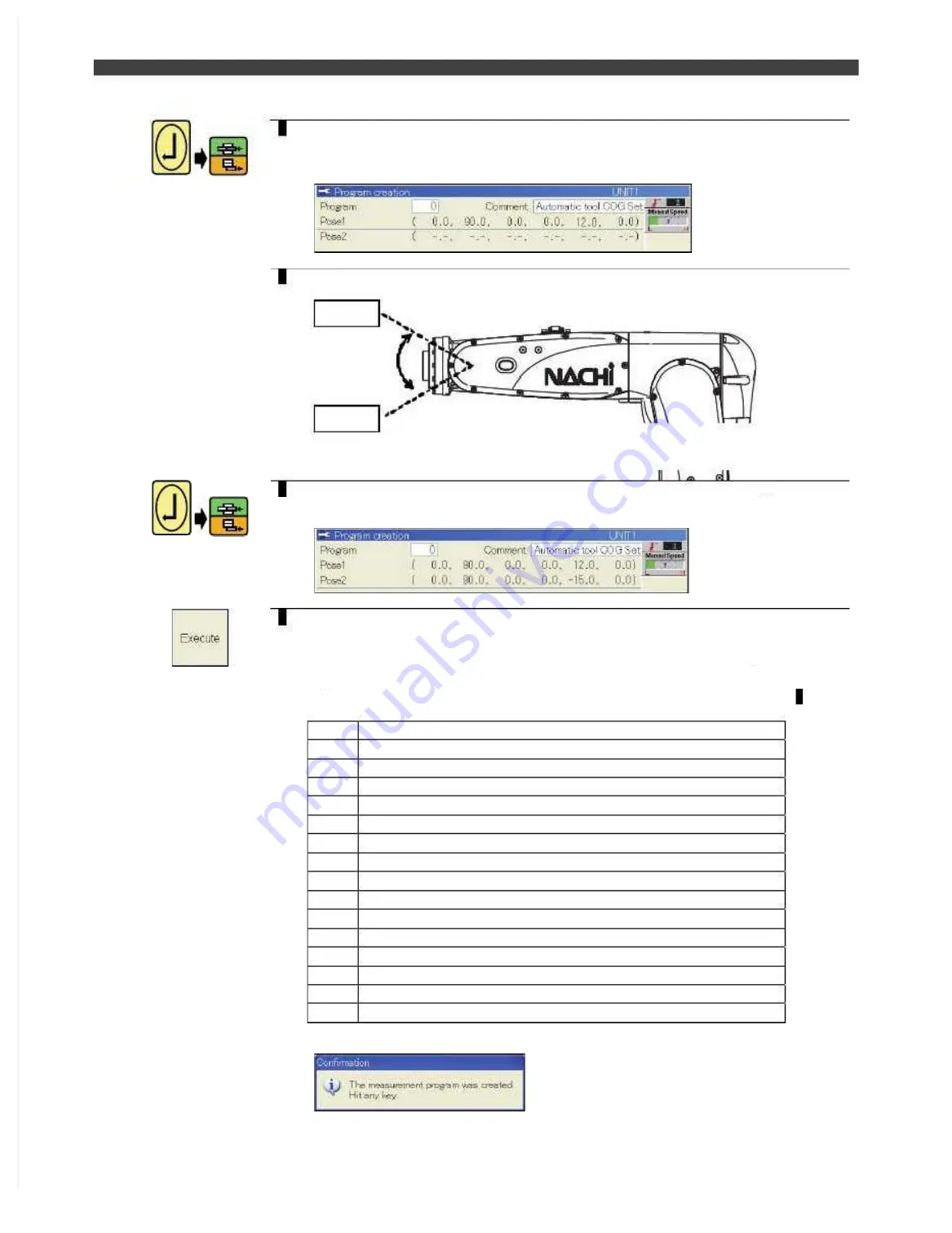
Align the cursor with the Pose 1 field, and press the [Enter] key and [O.WRITE/
REC] key.
>>The first posture (Pose 1) is now registered. The angle data loaded for the axes is
displayed as shown below.
7
Next, make a major change to the posture. At this time, change the wrist posture
as much possible.
Move the J5 up/down and record the position with
unbalance torque is being added to the J 3 and J6
Pose1
Pose2
8
Align the cursor with the Pose 2 field, and press [Enter] key and [REC] key.
>>The first posture (Pose 2) is now registered. The angle data loaded for the axes is
displayed as shown below.
9
This completes the registration of two of the points required. Press the f12
<Execute> key.
>>Based on the two postures registered in this way, the program shown below
consisting of a multiple number of steps for initiating the automatic center of gravity
(COG) and weight of tool settings is now generated automatically. The program No.
which is automatically generated at this time is the one which was specified in 4.
1
Comment data
2
Pose 1 point
3
Point where J6 axis is positioned when it has moved by 10 degrees
4
Pose 1 point
5
Point where J5 axis is positioned when it has moved by 10 degrees
6
Pose 1 point
7
Point where J3 axis is positioned when it has moved by 10 degrees
8
Pose 1 point
9
Pose 2 point
10
Point where J6 axis is positioned when it has moved by 10 degrees
11
Pose 2 point
12
Point where J5 axis is positioned when it has moved by 10 degrees
13
Pose 2 point
14
Point where J3 axis is positioned when it has moved by 10 degrees
15
Pose 2 point
16
END instruction
>>Upon completion of the automatic generation of the program, the following pop-up
message is displayed. Press any key.
The poses (robot positions) were recorded directly by following the instructions set forth above, but an
alternative to this is to teach a program in which these positions have been recorded ahead of time, and
then call that program.
Since a program can be used over and over again once it has been taught, this method is preferable in
cases such as a tool change application where the work involved in setting the center of gravity and weight
Summary of Contents for EZ-CFDL Series
Page 2: ......
Page 8: ...Table of Contents NOTE ...
Page 10: ...ぺージあわせのため白文字 白文字のため印刷されないなので気にしないでください 削除しないでください ...
Page 58: ...4 4Interference Territory registration NOTE ...
Page 59: ......
Page 68: ...5 4File transfer FTP server NOTE ...
Page 70: ......
Page 83: ......







































































