Temposonics
®
R-Series
V
PROFINET IO RT & IRT
Operation Manual
I 25 I
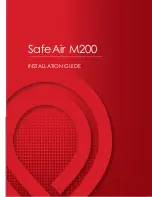
Fig. 32: Setting of the IRT mode
Fig. 33: Activation of isochronous control mode
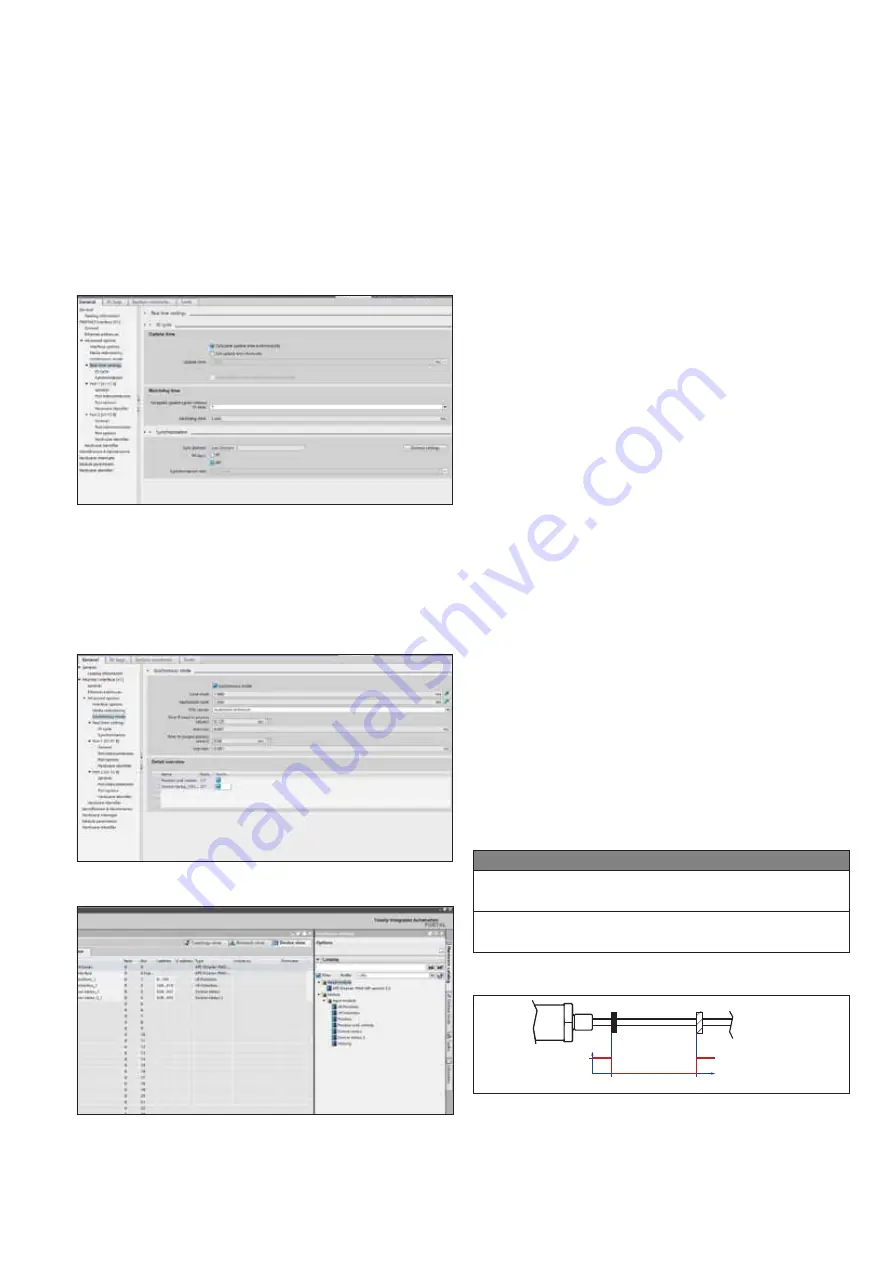
Fig. 34: Hardware Catalog
The R-Series
V
PROFINET supports both RT mode and IRT mode. The
sensor is set to the respective mode during connection setup with the
controller. By default, the sensor operates in RT mode. To operate the
sensor in IRT mode, select the tab “General” in the section “Advanced
options”. Select RT class "IRT" in the sub-section "Real time settings".
The IRT mode prioritizes the data packets (Fig. 322).
In order for the control unit to be able to access the sensor data
isochronously, the isochronous mode in the "Advanced options"
section of the "General" tab, has to be activated. This results in a
synchronization to the transmission clock to the controller. By default,
the isochronous mode is deactivated (Fig. 333).
Different input modules are available for the R-Series
V
PROFINET
with MTS profile. The following "Input modules" can be selected in the
"Catalog" section:
•
All positions:
This module contains the positions of up to
30 magnets. The number of magnets shown in this module depends
on the number of magnets specified in the parameter "Number of
magnets". With this module, 160 bytes are always transferred. Each
magnet is assigned 4 bytes for the position value (1
st
magnet: 0…3
bytes, 2
nd
magnet: 4…7, etc.). If less than 30 magnets are operated
on the sensor the unused bytes written with "0".
•
All velocities:
This module contains the velocity of up to
30 magnets. The number of magnets shown in this module depends
on the number of magnets specified in the parameter "Number of
magnets". With this module, 160 bytes are always transferred. Each
magnet is assigned 4 bytes for the velocity value (1st magnet: 0…3
bytes, 2nd magnet: 4…7, etc.). If less than 30 magnets are operated
on the sensor, the unused bytes are written with "0".
•
Position:
This module contains the position of a magnet. Afterwards
you must assign a magnet to this module.
•
Position and velocity:
This module contains the position and
velocity of a magnet. This module transfers 8 bytes. The bytes 0…3
contain the position value and the bytes 4…7 contain the velocity
value of the selected magnet. Afterwards you must assign a magnet
to this module.
•
Sensor status:
This module shows the following values of the
sensor:
• Current power supply in mV
• Number of magnets on the sensor rod
• Bit mask for indicating which magnet number is detected on the
sensor
Reading these status values is described on page 27.
• Sensor status 2:
This module indicates when a high limit is
exceeded or a low limit is not reached. The switching points mark
the beginning and the end of a work area (Fig. 36). According to
Fig. 35, the status of the switching points is displayed via bits 0 and
1 of this module.
Reading these status values is described on page 27.
Bit
Description
Bit 0
Low limit
• Bit value 0: Low limit not undershot
• Bit value 1: Low limit undershot
Bit 1
High limit
• Bit value 0: High limit not exceeded
• Bit value 1: Low limit exceeded
Fig. 35: Reported values of the switching points at module „Sensor status 2“
Fig. 36: Switching points for R-Series
V
PROFINET with MTS profile
Bit value
0
1
Stroke length
Low limit
High limit