Temposonics
®
R-Series
V
PROFINET IO RT & IRT
Operation Manual
I 35 I
•
Maximum master sign-of-life failures:
Specifies the number of allowed failures of the masters sign-of-
life. This parameter is only supported in compatibility mode V3.1.
If the maximum number of permissible errors is exceeded, the
position sensor sends a sign of life error in G1_XIST2.
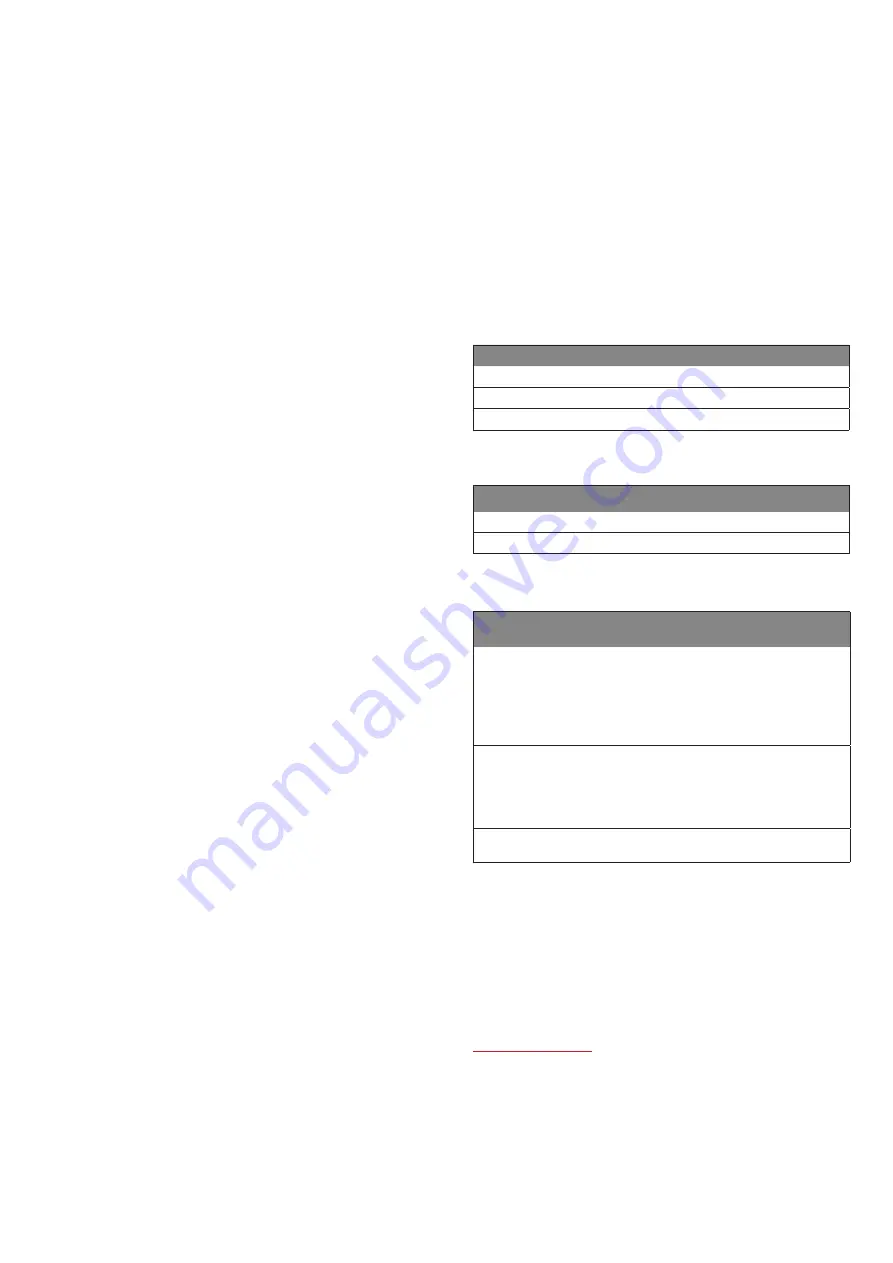
• Velocity unit
3
:
Specifies the coding of the velocity units used to configure the
signals NIST_A and NIST_B (Fig. 5959).
Velocity measuring units
Value
Steps/s
0
Steps/100 ms
1
Steps/10 ms
2
Fig. 59: Velocity units
Attribute
Meaning
Value
Enable
Compatibility with encoder profile V3.1
0
Disable
No backward compatibility (default)
1
Fig. 60: Compatibilty mode
Function
Compatibility mode
enabled (= 0)
Compatibility mode
disabled (= 1)
Control by
PLC
(STW2_ENC)
Ignored, the control word
(G1_STW) and the set
point values are always
valid. Control requested
(ZSW2_ENC) is not
supported and is set to 0.
Supported
User
parameter
alarm
channel
control
Supported
Not supported, the
application alarm channel
is active and controlled by
a PROFIdrive parameter.
P965 Profile
Version
31 (V3.1)
42 (V4.2)
Fig. 61: Function
3/
A “step” corresponds to the selected resolution
In addition to the manufacturer-specific parameters, there are the
following standard parameters according to the encoder profile:
•
Code sequence:
Specifies the measurement direction for position measurement
• CW (clockwise) = forward (values increasing from sensor
electronics housing to rod end/profile end)
(default value)
• CCW (counter clockwise) = reverse (values decreasing from
sensor electronics housing to rod end/profile end)
•
Class 4 functionality:
Activating/deactivating the following parameters: Code sequence,
scaling function, measuring step, total measuring range, velocity
unit and G1_XIST1 preset control. With “Class 4 functionality”
de-activated, the sensor measures with a resolution of 1 μm.
Any configured “Preset” is not taken into account and the
measuring direction is forward. If the parameter “G1_XIST1
preset control” is activated this will affect G1_XIST1, G1_XIST2
and G1_XIST3.
•
G1_XIST1 preset control (preset affects XIST1):
Specifies the effect of a preset on G1_XIST1. This parameter
is without function if the parameter Class 4 funtionality is
deactivated. If Class 4 functionality is activated and G1_XIST1
preset control is disabled, the position value in G1_XIST1 will not
be affected by a preset. Should be selected, if the preset should
have an impact not only on G1_XIST2 and G1_XIST3, but also on
G1_XIST1.
•
Scaling function control:
Activating/deactivating the scaling function. The “Scaling
function”- parameter can be used to change the encoder
resolution. Note that the “Scaling function” parameters can be
activated only, if “Class 4 functionality” and “Scaling function
control” are activated. Otherwise, the scaling function is disabled
and the resolution is 1 μm.
•
Alarm channel control:
Activating/deactivating the alarm channel. This parameter is used
to limit the amount of data sent. This parameter is only supported
in compatibility mode and can be deactivated only in compatibility
mode V3.1.
•
Compatibility mode V3.1:
Activating/deactivating the compatibility mode. This parameter
indicates, if the sensor should run in a mode compatible with
encoder profile 3.1. The functions which are affected when this
parameter is activated are listed in Fig. 611.
•
Measurement step:
Position measurement resolution 0.5, 1, 2, 5, 10, 50, 100 μm,
provided that the “Scaling function” is activated.
•
Measurement range:
Limits the measuring range to the number of measurement steps,
provided that the “Scaling function” is activated.
For more information about the standard parameters and functions
according to the encoder profile V4.2 please refer to the document
"Profile Drive Technology Encoder-Profile (Version 4.2)" from
PROFIBUS Nutzerorganisation e.V..
The operation manual and the GSD file for the R-Series
V
PROFINET
with encoder profile 4.1 (Profinet firmware < 2.2) can be found at
www.mtssensors.com
under "Legacy Products".