





























8 - 16
8 AUXILIARY AND APPLIED FUNCTIONS
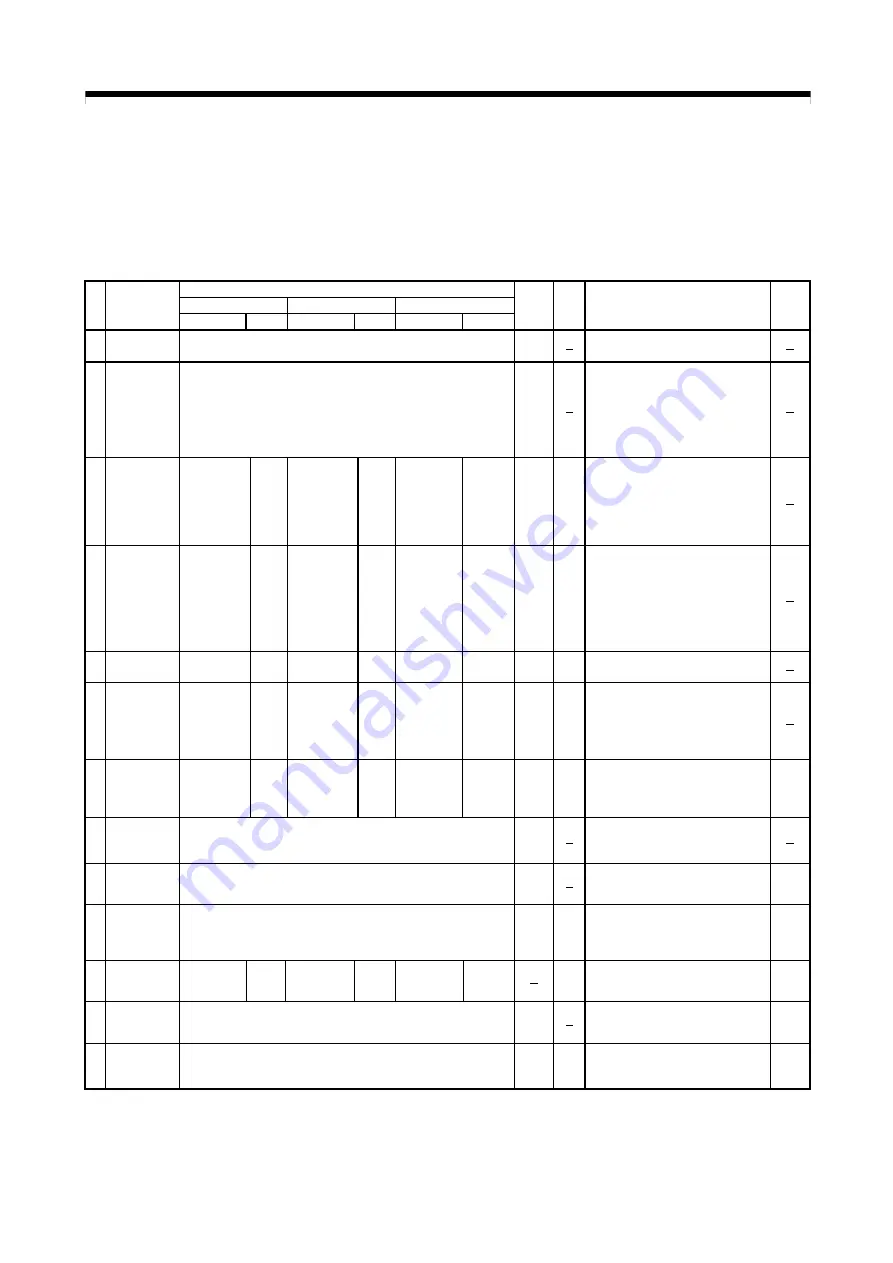
8.5.1 Home position return data
This data is used to execute the home position return.
Set this data using a peripheral device.
Table 8.2 Home position return data list
Setting range
mm inch degree
No. Item
Setting range Units Setting range Units Setting range
Units
Default
value
Units
Remarks
Explan-
atory
section
1
Home position
return direction
0: Reverse direction (Address decrease direction)
1: Forward direction (Address increase direction)
0
• The home position return direction is
set.
2
Home position
return method
0: Proximity dog type 1
4: Proximity dog type 2
1: Count type 1
5: Count type 2
6: Count type 3
2: Data set type 1
3: Data set type 2
7: Dog cradle type
8: Stopper type 1
9: Stopper type 2
10: Limit switch combined type
0
• The home position return method is
set.
• The proximity dog type or count type
are recommended for the servo
amplifier which does not support
absolute value.
3
Home position
address
–214748.3648
to
214748.3647
mm
–21474.83648
to
21474.83647
inch
0 to
359.99999
degree 0 mm
• The current value of home position
after the home position return is set.
• It is recommended that the home
position address is set in the upper
stroke limit value or lower stroke limit
value.
4
Second home
position
address
–214748.3648
to
214748.3647
mm
–21474.83648
to
21474.83647
inch
0 to
359.99999
degree 0 mm
• The current value of second home
position after the second home
position return is set.
• It is recommended that the second
home position address is set in the
upper stroke limit or lower stroke limit
value.
5
Home position
return speed
0.01 to
6000000.00
mm
/min
0.001 to
600000.000
inch
/min
0.001 to
2147483.647
degree
/min
0.01
mm
/min
• The home position return speed is set.
6 Creep
speed
0.01 to
6000000.00
mm
/min
0.001 to
600000.000
inch
/min
0.001 to
2147483.647
degree
/min
0.01
mm
/min
• The creep speed (low speed
immediately before stopping after
deceleration from home position return
speed) after the proximity dog ON is
set.
7
Travel value
after proximity
dog ON
0.0000 to
214748.3647
mm
0.00000 to
21474.83647
inch
0.0000 to
21474.83647
degree 0 mm
• The travel value after the proximity
dog ON for the count type is set.
• More than the deceleration distance at
the home position return speed is set.
8.5.1
(1)
8
Parameter
block setting
1 to 64
1
• The parameter block (Refer to Section
6.4) No. to use for home position
return is set.
9
Home position
return retry
function
0: Invalid (Do not execute the home position return retry by limit switch.)
1: Valid (Execute the home position return retry by limit switch.)
0
• Valid/invalid of home position return
retry is set.
8.5.1
(2)
10
Dwell time at
the home
position return
retry
0 to 5000[ms]
0
ms
• The stop time at the deceleration stop
during the home position return retry is
set.
8.5.1
(2)
11
Home position
shift amount
-214748.3648
to
214748.3647
mm
-21474.83648
to
21474.83647
inch
-21474.83648
to
21474.83647
degree
mm
• The shift amount at the home position
shift is set.
8.5.1
(3)
12
Speed set at
the home
position shift
0: Home position return speed
1: Creep speed
0
• The operation speed which set the
home position shift amount except
"0" is set.
8.5.1
(3)
13
Torque limit
value at the
creep speed
1 to 500[%]
300
%
• The torque limit value with creep
speed at the stopper type home
position return is set.
8.5.1
(4)
Summary of Contents for Q172CPU
Page 229: ...5 88 5 POSITIONING DEDICATED SIGNALS MEMO ...
Page 447: ...7 186 7 MOTION PROGRAMS FOR POSITIONING CONTROL MEMO ...
Page 535: ...8 88 8 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Page 557: ...11 10 11 COMMUNICATIONS VIA NETWORK MEMO ...
Page 559: ...12 2 12 MONITOR FUNCTION OF THE MAIN CYCLE MEMO ...





















































