





























7. POSITIONING CONTROL
7
−
61
(3) Stop commands and stop processing
The stop commands and stop processing for speed control are listed in Figure
7.1.
Fig. 7.1 Stop Commands and Stop Processing
Stop Command
Stop
Condition
Stopped Axis
Stop Processing
External STOP signal
Deceleration stop according to the
deceleration time on STOP input
designated in the parameter block or by
a servo instruction.
Stop command
(M3200+20n)
Deceleration stop according to the
deceleration time designated in the
parameter block or by a servo
instruction.
Rapid stop command
(Note-1)
(M3201+20n)
OFF
→
ON
Designated
axis
Deceleration stop according to the rapid
stop deceleration time designated in the
parameter block or by a servo
instruction.
Emergency stop from
peripheral device
(Note-1)
(test mode)
Key input
All axes
Deceleration stop according to the rapid
stop deceleration time designated in the
parameter block or by a servo
instruction.
Speed changed to 0
Value stored in
speed change
register
Designated
axis
Deceleration stop according to the
deceleration time designated in the
parameter block or by a servo
instruction.
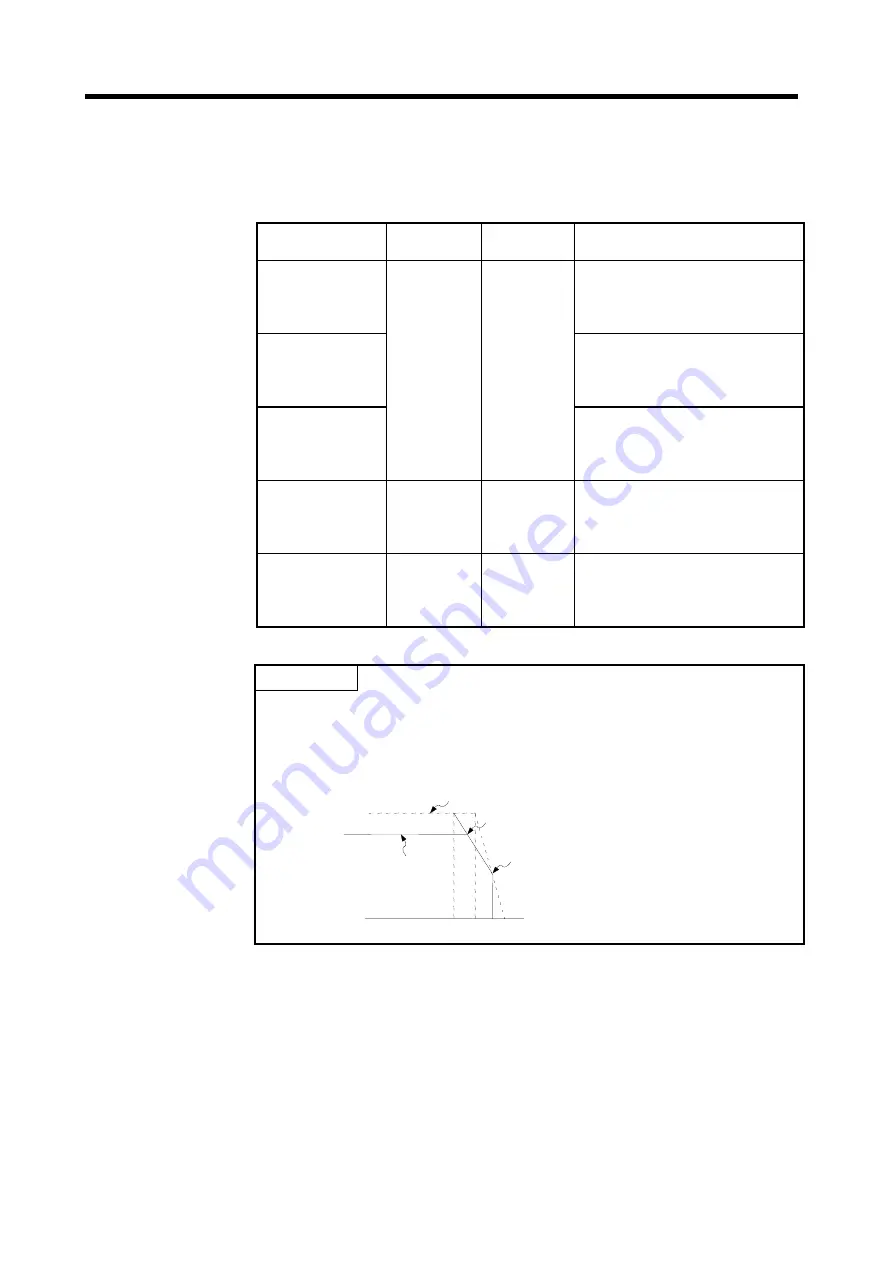
POINT
(Note-1): The rapid stop command and emergency stop from a peripheral
device are valid during deceleration due to input of an external
STOP signal or the stop command (M3200
+
20n), and processing
according to the rapid stop deceleration time parameter starts at the
time the stop condition occurs.
Rapid stop command or emergency
stop signal from peripheral device
STOP signal or stop command
from external source
Operation speed
Speed limit value
[Cautions]
(1) After running speed control using the absolute data system, the feed current
value cannot be set to zero by the following operations:
•
Reset with the RUN key
•
Turning on the servo power supply (OFF
→
ON)
(2) The dwell time cannot be set.





















































