





























7. POSITIONING CONTROL
7
−
14
(2) Restarting after a Stop
(a) Control cannot be restarted after a stop command or stop cause (except
changing speed to zero).
However, restarting is possible using the VSTART instruction after a stop
due to the external STOP input, the stop command (M3200
+
20n) turning
ON, or the rapid stop command (M3201
+
20n) turning ON during
speed/position switching control.
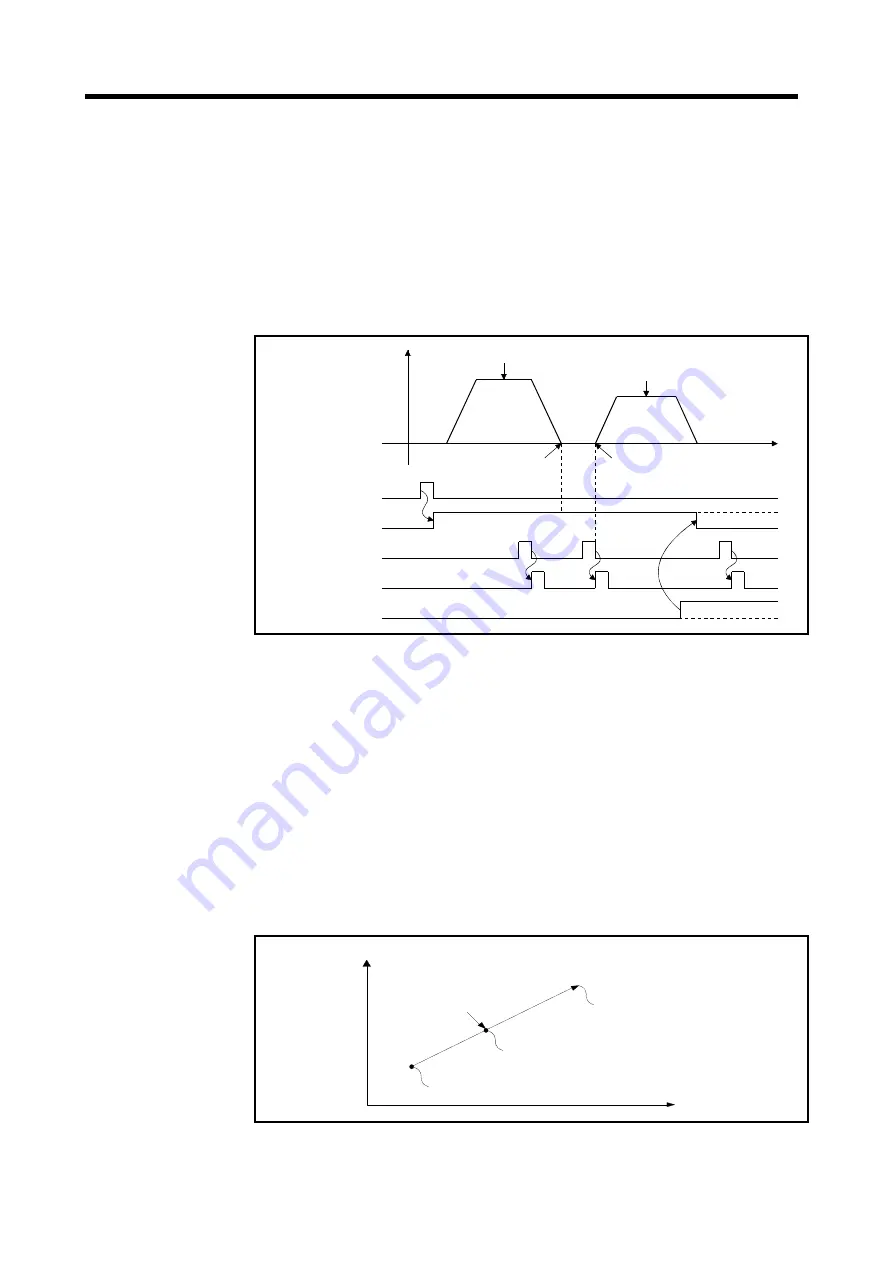
(b) When the stop is caused by a speed change to speed "0"
When a speed change to speed "0" is executed in the CHGV instruction,
operation can be restarted by executing another speed change to a speed
other than "0".
OFF
ON
1)
2)
Restart
Stop because speed
change to zero
3)
Start accept flag
(M2001+n)
SVST instruction
CHGV instruction
Speed change flag
(M2061+n)
Stop command
(M3200+20n)
V
t
Speed before speed change
Speed after restant
1) The start accept flag M2001
+
n remains ON after a stop due to changing
the speed to zero.
2) Restart after changing the speed again.
3) However, control cannot be restarted after the speed is changed if the
start accept flag M2001
+
n is turned OFF due to the stop command
(M3200
+
20n) turning ON.
(3) Continuing positioning control
This section describes the method to continue control from the servo program
number where the stop was applied by turning ON the external STOP input, the
stop command (M3200
+
20n), or the rapid stop command (M3201
+
20n).
(a) 1-axis linear control/2 or 3-axes linear interpolation control
1) Absolute data method ....... As a target address is designated, positioning
control is possible from the stop address to the
target address.
Target address
Start address 2 after stop
Start address 1
Stop position due to
stop command
Axis
2
Axis
1





















































