





























11. Commissioning
MiR250 Shelf Carrier User Guide (en) 03/2021 - v.1.4 ©Copyright 2021: Mobile Industrial Robots A/S.
127
Cleaning up a map
The robot navigates best when using a clean map with as little noise as possible.
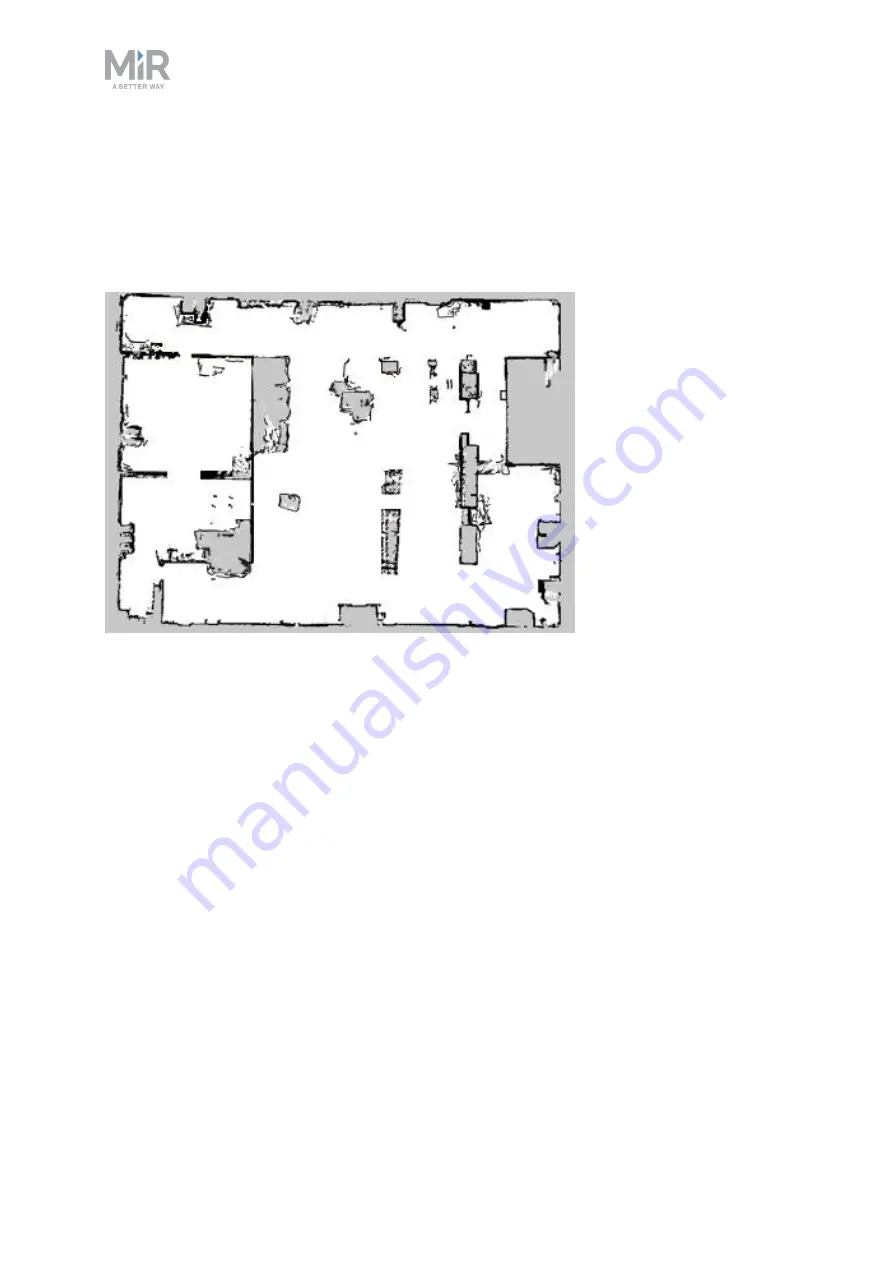
is an example of what a map can look like after the mapping process but where it still needs
further editing.
Figure 11.5. Example of a map that includes too much noise and dynamic obstacles.