





























KINOVA
®
Communication system
User Guide
20
Alternatively, if the communication adapters are being connected to a local network with a
DHCP server, the communication adapter interfaces can be configured, via the CLI, as DHCP
clients, receiving their IP settings from the DHCP server.
Note:
When configuring a communication adapter as a DHCP client, ensure that a DHCP server
is connected. If the power cycles while the adapter is set as a DHCP client, and there is no DHCP
server connected, the adapters will not receive IP addresses.
To enable communication between the two communication adapters, it is also necessary to
configure, on each communication adapter, the IP address and port for the network interfaces
of the other communication adapter.
When the communication adapters are purchased as a pair, the adapters will arrive with the
IP settings pre-configured. If you later need to replace one of the adapters, configuration may
need to be performed using the CLI to ensure that the new adapter has properly configured IP
settings and so that the two adapters will be paired to communicate with each other.
Default network interface settings
This section describes the default network interface settings for the communication
adapters and the robot.
Network interfaces default settings
The default static network settings are as follows. When the communication system is
purchased with two paired communication adapters, the adapters are factory-configured to
the following static IP settings. A replacement unit will generally be configured by Kinova with
default IP settings for the role it is to take on, unless otherwise requested.
Communication Adapter IP settings can be configured, if desired, in the field, using the
communication adapter command line interface (CLI).
Note:
The robot base IP address is not configurable using the communication adapter
CLI tool. It is only configurable using the Kinova Development Center application. It is
strongly recommended to leave the robot IP address in its default setting and configure the
communication adapter robot interfaces to be compatible with this default IP address for the
robot base.
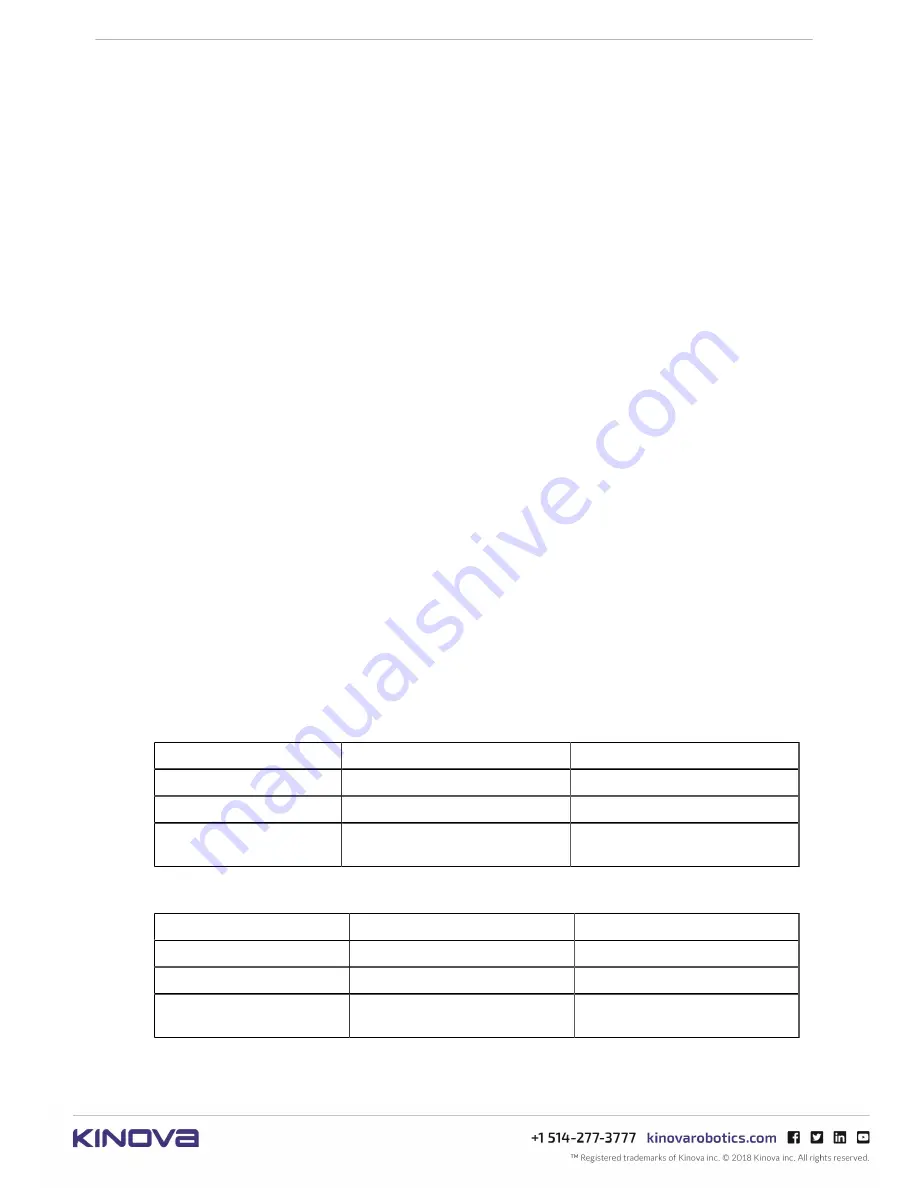
Table 2: Operator Adapter network interface default IP addresses (static)
Interface
IP address
Subnet mask
Robot interface
192.168.100.100
255.255.255.0
Wired network interface
172.16.0.10
255.255.255.0
Radio interface (for radio
model of adapter)
192.168.111.10
255.255.255.0
Table 3: Remote Adapter network interface default IP addresses (static)
Interface
IP address
Subnet mask
Robot interface
192.168.100.100
255.255.255.0
Wired network interface
172.16.0.11
255.255.255.0
Radio interface (for radio
model of adapter)
192.168.111.11
255.255.255.0







































































