





























65
10.13.2
Selection Output Functions
REFERENCE has been completed REFFERENCE
In motion, motor is running IN MOTION
End of program END OF PROGRAM
Trigger (5ms, defined by TGU, TGD commands) TGIGGER
Error pending ERROR
Release brake BRAKE
In position, within deviation target position (DTP) IN POSITION
Limit I_Force reached (command LIF) I FORCE MAX LIMIT
I Force In Sector, when motion is completed I FORCE IN SECTOR
In Sector (during and after motion is completed) IN SECTOR
In Force (during and after motion is completed) IN FORCE
Warning pending WARNING
Information pending
INFORMATION
STO Feedback 1
STO1*
STO Feedback 2
STO2*
SS1 Feedback 1
SS11*
SS1 Feedback 2
SS12*
SS2 Feedback 1
SS21*
SS2 Feedback 2
SS22*
SLS Feedback 1
SLS1*
SLS Feedback 2
SLS2*
* Feedbacks are status information and not SMU
safety functions. Only possible with optional SMU
(Safety Motion Unit).
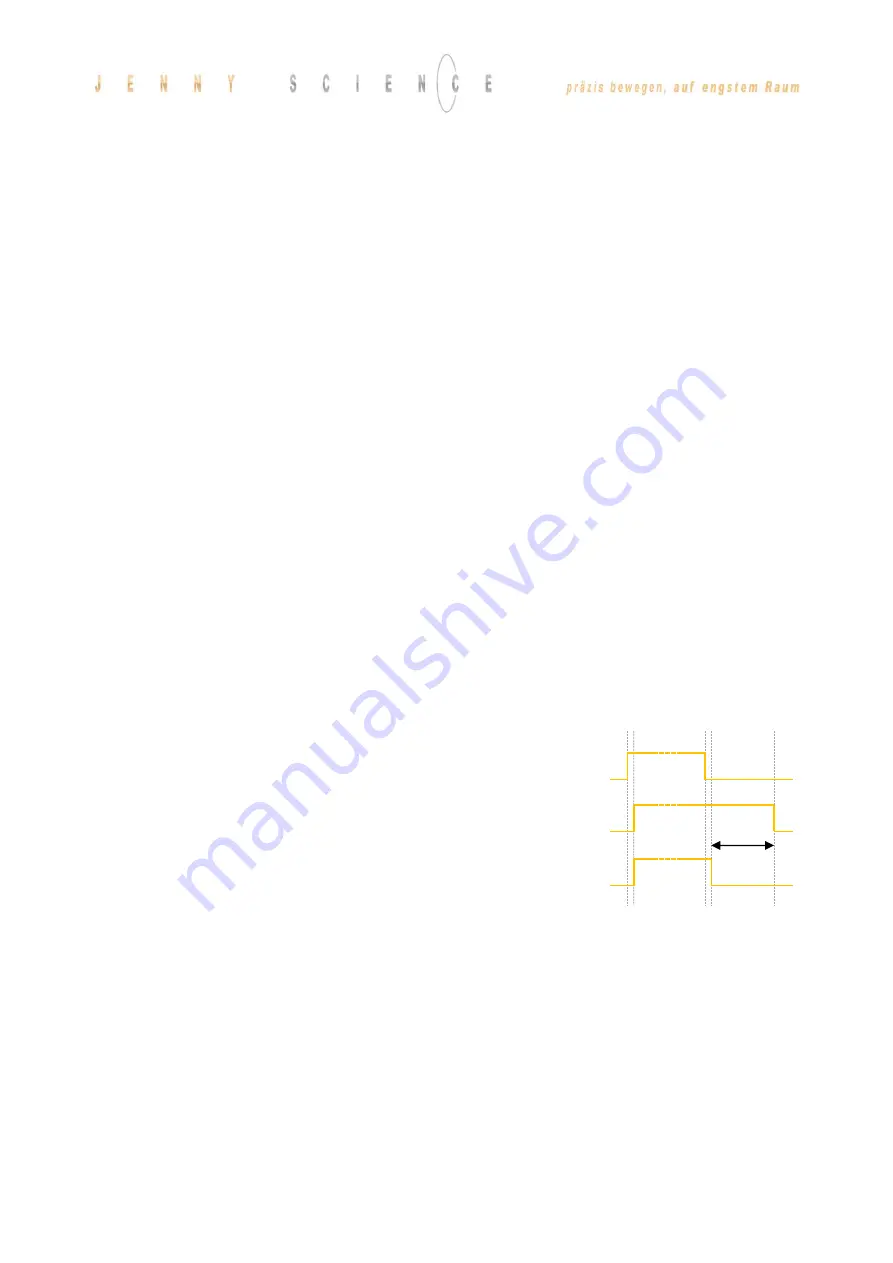
10.13.3
Operation with Additional Holding Brake
An additional holding brake for LINAX® Lxs and Lxu
Motor types can be controlled with a XENAX® servo
controller. The output function BRK (Brake) can be
assigned to one of the controller outputs and used in
combination with the BRKD (Brake delay) parameter.
This function allows the activation of a time delay by
turning off the power stage. First the brake control
signal output is set to low (brake is active) and after
BRKD milliseconds (setting range from 1 to 1000ms)
the power stage is turned off.
This feature allows an active braking with a switched-
on power stage and after this a controlled power
stage turn off, when the brake is safely on. The time
delay is only effective by turning off the power stage.
BRKD
Power stage
Enable/disable
commands
BRK Output







































































