





























80
10.18.3
Reference ROTAX® und Third Party Motors
For ROTAX® and third party motors only, for LINAX®
or ELAX® please use directly command
„>REF“.
CLOCKWISE
= clockwise
COUNTER CLOCKWISE
= counter clockwise
REF DIR
Defines start direction for searching the external REF
sensors 1 = CLOCKWISE, 2 = COUNTER CLOCKWISE
REF SPEED
Defines speed to search the external
REF sensor.
If no home sensor exists, then set this value to 0.
REF INPUT
REF sensor external, input number (NONE or 1-8).
Z-MARK DIR
Defines start direction for searching the Z-mark on
encoder 1 = CLOCKWISE, 2 = COUNTERCLOCKWISE.
Or 3 = ON SHORTEST WAY (shortest way, only
possible at ROTAX® Rxvp).
Z-MARK SPEED
Speed to search the Z-mark. If no Z mark (Reference
mark) exists, then set this value to 0.
CLEAR OUPTPUTS
Set all outputs to OFF after reference.
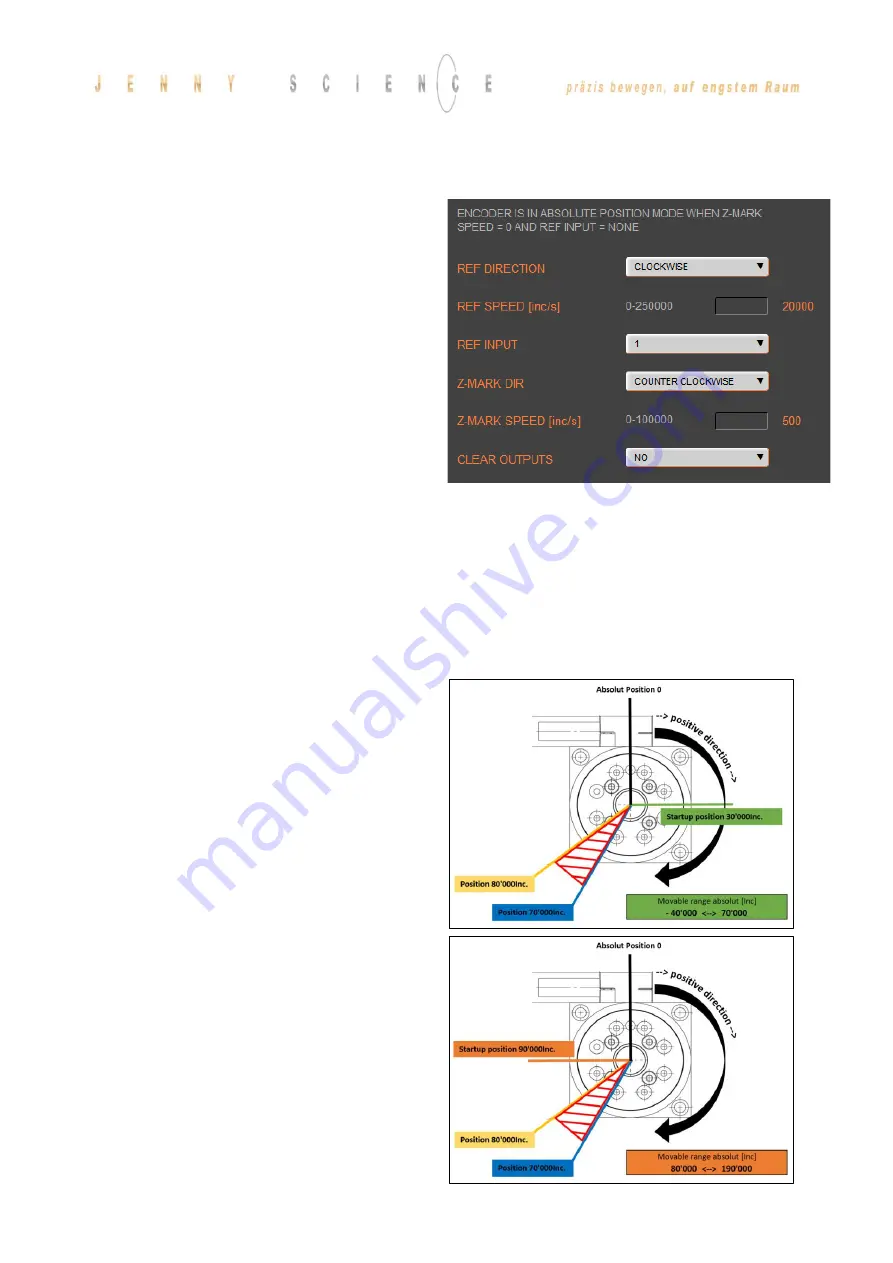
Note for ROTAX® Rxhq:
Due to the absolute position, the ROTAX® Rxhq is
immediately ready for operation after power-on, no
reference drive is necessary.
For this purpose, the Z-MARK DIR must be set to 0
and the REF INPUT to NONE.
The position of the encoder immediately after startup
always has a value between 0 and 119'999Inc. E.g. in
case of a mechanical stop the movable range of the
encoder changes depending on the range (between 0
and mechanical stop in positive direction or between
0 and mechanical stop in negative direction) in which
the motor is starting up.







































































