























19
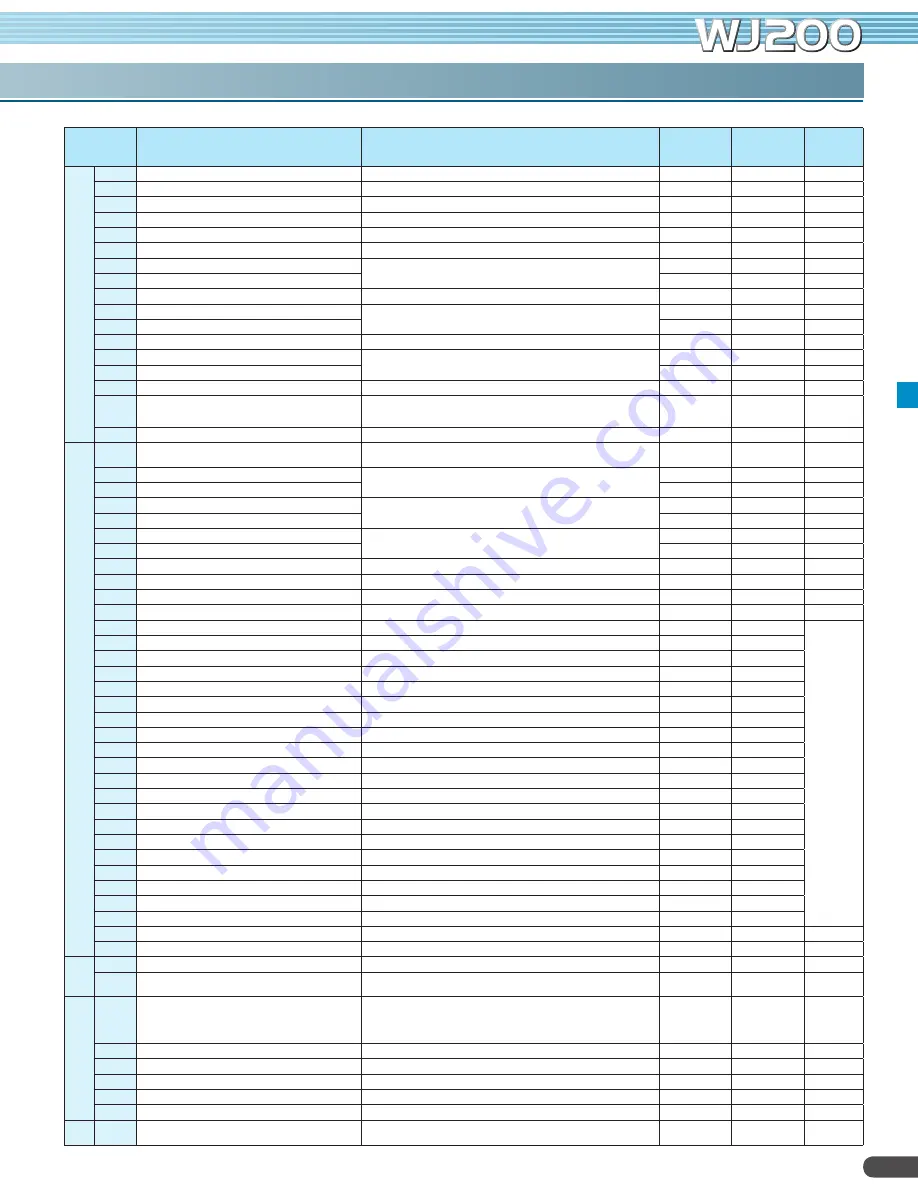
Code
Function Name
Setting Range
Setting During
Operation
(allowed or not)
Change During
Operation
(allowed or not)
Default
Setting
In
pu
t/
O
ut
pu
t t
er
m
in
al o
pe
ra
ti
on f
un
ct
io
n
C130
Output 11 on-delay time
0.0 to 100.0 [s]
×
○
0.0
C131
Output 11 off-delay time
0.0 to 100.0 [s]
×
○
0.0
C132
Output 12 on-delay time
0.0 to 100.0 [s]
×
○
0.0
C133
Output 12 off-delay time
0.0 to 100.0 [s]
×
○
0.0
C140
Output RY on-delay time
0.0 to 100.0 [s]
×
○
0.0
C141
Output RY off-delay time
0.0 to 100.0 [s]
×
○
0.0
C142
Logical output signal 1 selection 1
Same as the settings of C021 to C026 (except those of LOG1 to LOG3 & OPO, no)
×
○
00
C143
Logical output signal 1 selection 2
×
○
00
C144
Logical output signal 1 operator selection
00 (AND) / 01 (OR) / 02 (XOR)
×
○
00
C145
Logical output signal 2 selection 1
Same as the settings of C021 to C026 (except those of LOG1 to LOG3 & OPO, no)
×
○
00
C146
Logical output signal 2 selection 2
×
○
00
C147
Logical output signal 2 operator selection
00 (AND) / 01 (OR) / 02 (XOR)
×
○
00
C148
Logical output signal 3 selection 1
Same as the settings of C021 to C026 (except those of LOG1 to LOG3 & OPO, no)
×
○
00
C149
Logical output signal 3 selection 2
×
○
00
C150
Logical output signal 3 operator selection
00 (AND) / 01 (OR) / 02 (XOR)
×
○
00
C160
l
C166
Response time of intelligent input terminal 1 – 7
0 to 200 ( × 2ms)
×
○
1.
C169
Multistage speed / position determination time
0. to 200. (× 10ms)
×
○
0.
M
ot
or C
on
st
an
ts a
nd G
ai
n S
et
ti
ng
H001
Auto-tuning Setting
00 (disabled auto-tuning) / 01 (auto-tuning without rotation) /
02 (auto-tuning with rotation)
×
×
00
H002
Motor data selection
00 (Hitachi standard data) / 02 (auto-tuned data)
×
×
00
H202
Motor data selection, 2nd motor
×
×
00
H003
Motor capacity
0.1 / 0.2 / 0.4 / 0.55 / 0.75 / 1.1 / 1.5 / 2.2 / 3.0 / 3.7 / 4.0 / 5.5 / 7.5 / 11.0 / 15.0 / 18.5 [kW]
×
×
Factory set
H203
Motor capacity, 2nd motor
×
×
Factory set
H004
Motor poles setting
2 / 4 / 6 / 8 / 10 [pole]
×
×
4
H204
Motor poles settingg, 2nd motor
×
×
4
H005
Motor speed response constant
1 to 1000
○
○
100.
H205
Motor speed response constant, 2nd motor
1 to 1000
○
○
100.
H006
Motor stabilization constant
0 to 255
○
○
100.
H206
Motor stabilization constant, 2nd motor
0 to 255
○
○
100.
H020
Motor constant R1
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
Depending
on motor
capacity
H220
Motor constant R1, 2nd motor
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H021
Motor constant R2
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H221
Motor constant R2, 2nd motor
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H022
Motor constant L
0.01 to 99.99 / 100.0 to 655.3 [mH]
×
×
H222
Motor constant L, 2nd motor
0.01 to 99.99 / 100.0 to 655.3 [mH]
×
×
H023
Motor constant I0
0.01 to 99.99 / 100.0 to 655.3 [A]
×
×
H223
Motor constant I0, 2nd motor
0.01 to 99.99 / 100.0 to 655.3 [A]
×
×
H024
Motor constant J
0.001 to 9.999 / 10.00 to 99.99 / 100.0 to 999.9 / 1000. to 9999. [kgm
2
]
×
×
H224
Motor constant J, 2nd motor
0.001 to 9.999 / 10.00 to 99.99 / 100.0 to 999.9 / 1000. to 9999. [kgm
2
]
×
×
H030
Auto constant R1
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H230
Auto constant R1, 2nd motor
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H031
Auto constant R2
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H231
Auto constant R2, 2nd motor
0.001 to 9.999 / 10.00 to 65.53 [Ω]
×
×
H032
Auto constant R1
0.01 to 99.99 / 100.0 to 655.3 [mH]
×
×
H232
Auto constant R1, 2nd motor
0.01 to 99.99 / 100.0 to 655.3 [mH]
×
×
H033
Auto constant R1
0.01 to 99.99 / 100.0 to 655.3 [A]
×
×
H233
Auto constant R1, 2nd motor
0.01 to 99.99 / 100.0 to 655.3 [A]
×
×
H034
Auto constant R1
0.001 to 9.999 / 10.00 to 99.99 / 100.0 to 999.9 / 1000. to 9999. [kgm
2
]
×
×
H234
Auto constant R1, 2nd motor
0.001 to 9.999 / 10.00 to 99.99 / 100.0 to 999.9 / 1000. to 9999. [kgm
2
]
×
×
H050
ASR P-Gain for FB control
0.00 to 10.00
○
○
0.20
H051
ASR I-Gain for FB control
0 to 1000
○
○
2
Ot
he
rs
P001
Operation mode on expansion card 1 error
00 (tripping) / 01 (continuing operation)
×
○
00
P003
Pulse train input terminal [EA] mode determination
00 (Speed reference, incl. PID) / 01 (control for encoder feedback [1st only]) /
02 (Extended terminal for EzSQ)
×
×
00
Co
nt
ro
l w
it
h F
B
P004
Pulse train input mode selection for simple Positioning
00 (Single-phase pulse input) /
01 (2-phase pulse [90
º
difference] input 1 with EB input) /
02 (2-phase pulse [90
º
difference] input 2 with EB input) /
03 (Single-phase pulse and direction signal with EB input)
×
×
00
P011
Encoder pulse-per-revolution (PPR) setting
32 to 1024 [pulse]
×
×
512
P012
Control pulse setting
00 (simple positioning deactivated) / 02 (simple positioning activated)
×
×
00
P015
Creep speed setting
"start frequency" to 10.00Hz
×
○
5.00
P026
Over-speed error detection level setting
0.0 to 150.0 [%]
×
○
115.0
P027
Speed deviation error detection level setting
0.00 to 99.99 / 100.0 to 120.0 [Hz]
×
○
10.00
Ot
her
s
P031
Accel / decel time input selection
00 (digital operator) /
03 (easy sequence)
×
×
00
Function List
[
○
= Allowed × = Not parmitted
]
Stöwer Antriebstechnik GmbH, Enneststrasse 3, 51702 Bergneustadt, tel: 02261-40970, Fax: 02261-41309







































































