





























The Festo_PartDetector.lib library
10
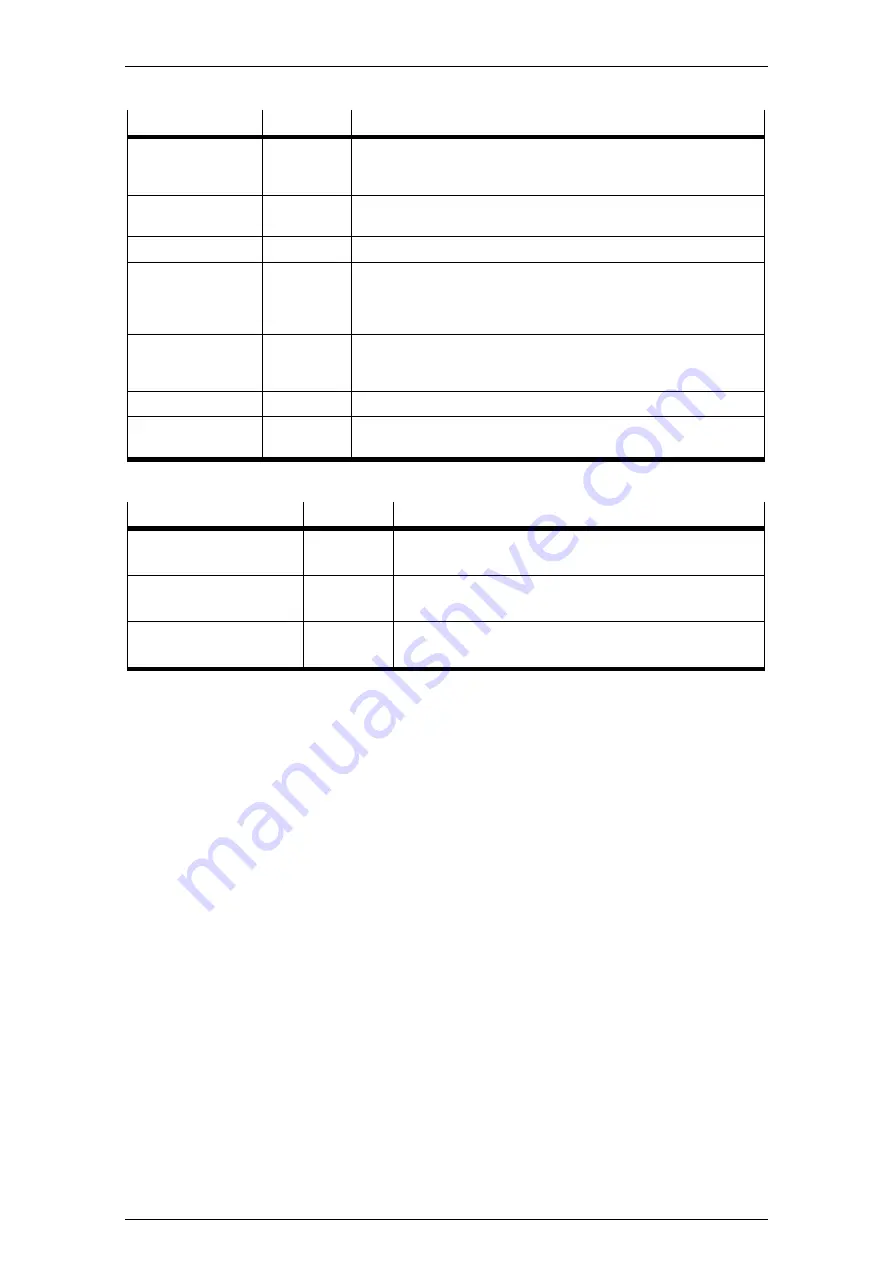
1.6 Interfaces – Inputs
Input
Type
Description
Connect
BOOL
If there is a rising edge, the module takes the created access data
and attempts to log in. If there is a falling edge, the module
attempts to log out.
StartDetection
BOOL
The taking of pictures and processing runs continuously as long as
this input is TRUE.
SinglePicture
BOOL
If there is a rising edge, a single picture is taken.
MinPictureDistance LREAL
Specifies the minimum distance between two successive pictures.
The frequency of the pictures is thus also specified indirectly. If the
distance between two pictures is significantly greater than
MinPictureDistance, the maximum frame rate could be used.
ResetIDCounter
BOOL
If there is a rising edge, the counter for the part ID is set to the
value IDRes1. The part ID is an identification number,
which is assigned to each newly detected part.
IDResetValue
DINT
ResetIDCounter.
ClearInternalBuffer
BOOL
A rising edge causes clearing of the internal buffer for duplicate
part detection.
1.6.1 Settings for the detection of parts detected multiple times
Input
Type
Brief description
DuplicateDetectionEnabled
Default: TRUE
BOOL
Default for the recognition of parts on the conveyor.
PositionTolerance
Default: 1
LREAL
Tolerance range for the recognition of parts on the
conveyor.
ConveyorLimit
Default: 1000
LREAL
Maximum distance for saved parts on the conveyor in the
allPartsList array.
DuplicateDetectionEnabled
If the DuplicateDetectionEnabled parameter is TRUE, parts are only output as "new parts" if they were not
already detected at the same position on the conveyor. Previously detected parts are saved in the
allPartsList array.
If the DuplicateDetectionEnabled is FALSE, all detected parts are output as "new parts" for each picture.
Furthermore, they are not saved in the allPartsList array.
PositionTolerance
Given the fact that the part position when detected by the Compact Vision System can vary slightly
(particularly if the conveyor position is changed), a tolerance range must be specified. The tolerance range
specifies the maximum value (e.g. in mm) by which the part position can deviate from the assumed part
position without the part being interpreted as a new part. The tolerance range is set in global coordinate
units.
Example
A part is detected at the position (X= 40 mm / Y= 50 mm). The conveyor moves 100 mm in the X direction.
(X= 140 mm / Y= 50 mm) is expected as the new position for the part. However, due to visual effects and
inaccuracies in the calculation, the part is detected at the position (X= 142 mm / Y= 49 mm).
–
If the PositionTolerance parameter = 1 (mm) or less, the part is detected as a new part, as the
tolerance range for X extends from 139 mm to 141 mm (40 mm + 100 mm +/– 1 mm). The part is thus
incorrectly detected as a second (new) part and output.
–
If the PositionTolerance parameter = 2 (mm) or more, the tolerance range extends from 138 mm to
142 mm (40 mm + 100 mm +/– 2 mm). The part position is thus within the tolerance range, whereby it
assumed that only the part has moved. Only one part is then correctly output.
Summary of Contents for CECX-X-C1 Series
Page 1: ...Manual Controller Modular CECX CECX X C1 CECX X M1 761886 1112c en ...
Page 2: ...1112c en ...
Page 4: ......
Page 6: ...1112c en ...
Page 7: ...CECX modular control system CECX modular control system ...
Page 46: ...CECX modular control system CECX I 38 ...
Page 47: ...System manual CECX ...
Page 48: ...CECX II ...
Page 56: ...Content System Manual CECX VIII ...
Page 58: ...System manual CECX Product design CECX II 0 2 ...
Page 68: ...System manual CECX Safety notes CECX II 2 6 ...
Page 76: ...System manual CECX System overview CECX II 3 8 ...
Page 84: ...System manual CECX General assembly and installation instructions CECX II 4 8 ...
Page 118: ...System manual CECX Operating behavior CECX II 8 6 ...
Page 122: ...System manual CECX Disposal CECX II 10 2 ...
Page 124: ...System manual CECX Technical data CECX II 11 2 ...
Page 166: ......
Page 180: ......
Page 212: ......
Page 232: ......
Page 248: ......
Page 260: ......
Page 278: ......
Page 294: ......
Page 308: ......
Page 412: ......
Page 426: ......
Page 500: ...System manual CECX Bus link module CECX B CO CECX II 34 64 ...
Page 501: ...The library Ethernet lib The library Ethernet lib ...
Page 505: ...The library EventData lib The library EventData lib ...
Page 511: ...The library IncEnc lib The library IncEnc lib ...
Page 517: ...The Festo_EasyIP lib library ...
Page 532: ......
Page 535: ...The library PLCService lib The library PLCService lib ...
Page 542: ...The library PLCService lib CECX VII 6 ...
Page 543: ...The library SysLibComEx lib The library SysLibComEx lib ...
Page 547: ...The Festo_Motion lib library ...
Page 584: ......
Page 585: ...The Festo_PartDetector lib library ...
Page 601: ...FED VipWin interface ...
Page 630: ......







































































