





























EM12 User’s Manual
5. Description of Function Codes
47
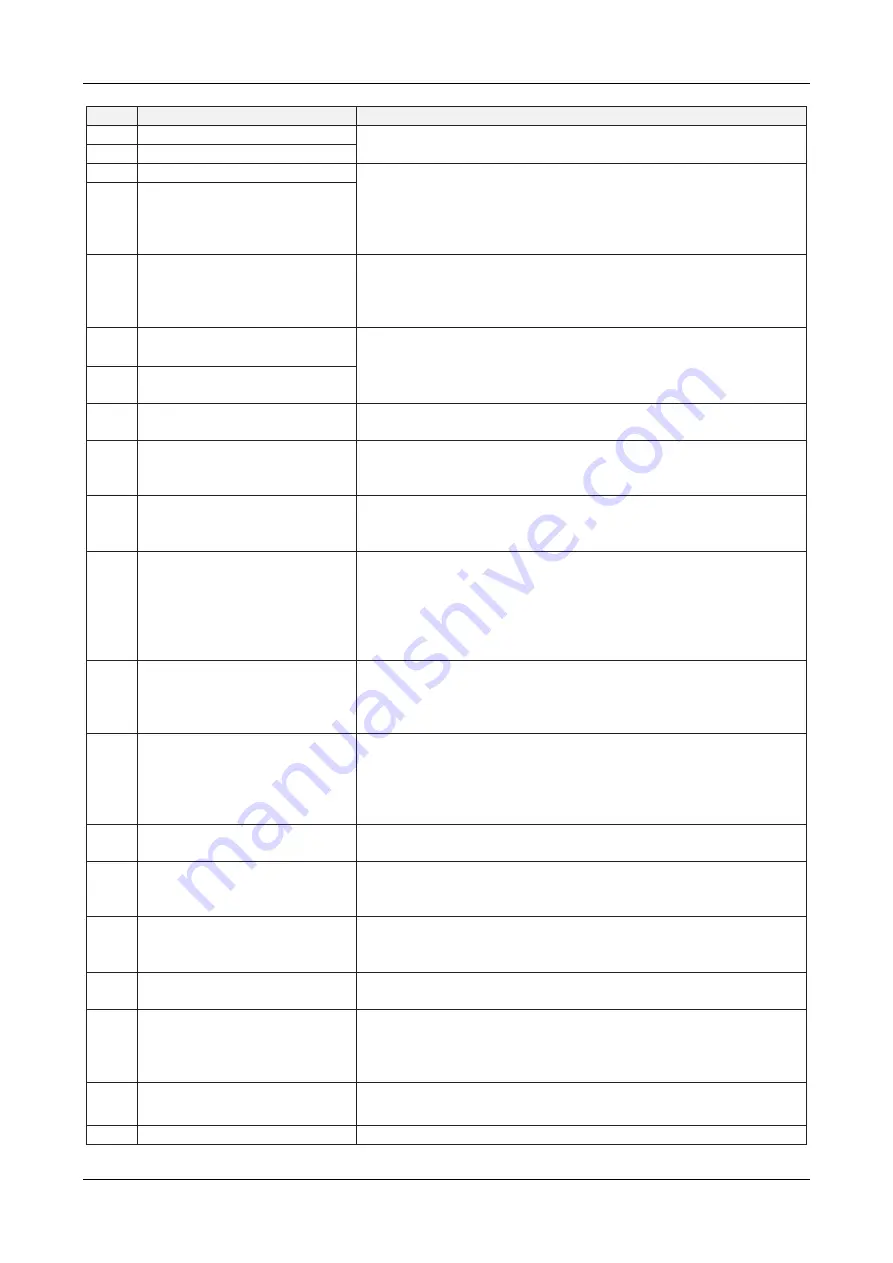
Value
Function
Description
8
Multi-function terminal 3
9
Multi-function terminal 4
10
Terminal UP
If the frequency is determined by external terminals, the terminals
with the two functions are used as increment and decrement
commands for frequency modification.
When the frequency source is digital setting, they are used to adjust
the frequency.
11
Terminal DOWN
12
UP and DOWN setting clear
(terminal, operation panel)
If the frequency source is digital setting, the terminal is used to clear
the modification by using the UP/ DOWN function or the
increment/decrement key on the operation panel, returning the set
frequency to the value of b0-12.
13
Terminal 1 for acceleration/
deceleration time selection
Totally four groups of acceleration/deceleration time can be selected
through combinations of two states of these two terminals.
14
Terminal 2 for acceleration/
deceleration time selection
15
Frequency source switchover
The terminal is used to perform switchover between two frequency
sources according to the setting in b0-07.
16
Switchover between main
frequency source X and preset
frequency
After this terminal becomes ON, the frequency source X is replaced
by the preset frequency (b0-12).
17
Switchover between auxiliary
frequency source Y and preset
frequency
After this terminal is enabled, the frequency source Y is replaced by
the preset frequency (b0-12).
18
Terminal 1 for Command source
switchover
If the command source is set to terminal control (b0-02
= 1), this terminal is used to perform switchover between terminal
control and operation panel control.
If the command source is set to communication control (b0-02 = 2),
this terminal is used to perform switchover between communication
control and operation panel control.
19
Terminal 2 for Command source
switchover
It is used to perform switchover between terminal control and
communication control. If the command source is terminal control, the
system will switch over to communication control after this terminal
becomes ON.
20
Speed control/Torque control
switchover
This terminal enables the frequency inverter to switch over between
speed control and torque control. When this terminal becomes OFF,
the frequency inverter runs in the mode set in d1-00. When this
terminal becomes ON, the frequency inverter switches over to the
other control mode.
21
Torque control prohibited
The Frequency inverter is prohibited from torque control and enters
the speed control mode.
22
PID pause
PID is invalid temporarily. The frequency inverter maintains the
present frequency output without supporting PID adjustment of
frequency source.
23
PID integral pause
After this terminal becomes ON, the integral adjustment function
pauses. However, the proportional and differentiation adjustment
functions are still valid.
24
Reverse PID action direction
After this terminal becomes ON, the PID action direction is reversed
to the direction set in C0-04.
25
PID parameter switchover
If the PID parameters switchover performed by means of DI terminal
(C0-12 = 1). When the terminal becomes OFF; the PID parameters are
C0-06~C0-08; when this terminal becomes ON, the PID parameters
switch to C0-09 ~ C0-11.
26
PLC status reset
The terminal is used to restore the original status of PLC control for
the frequency inverter when PLC control is started again after a pause.
27
Swing frequency pause
The frequency inverter outputs the central frequency, and the swing
Summary of Contents for EM12 Series
Page 5: ......







































































