





























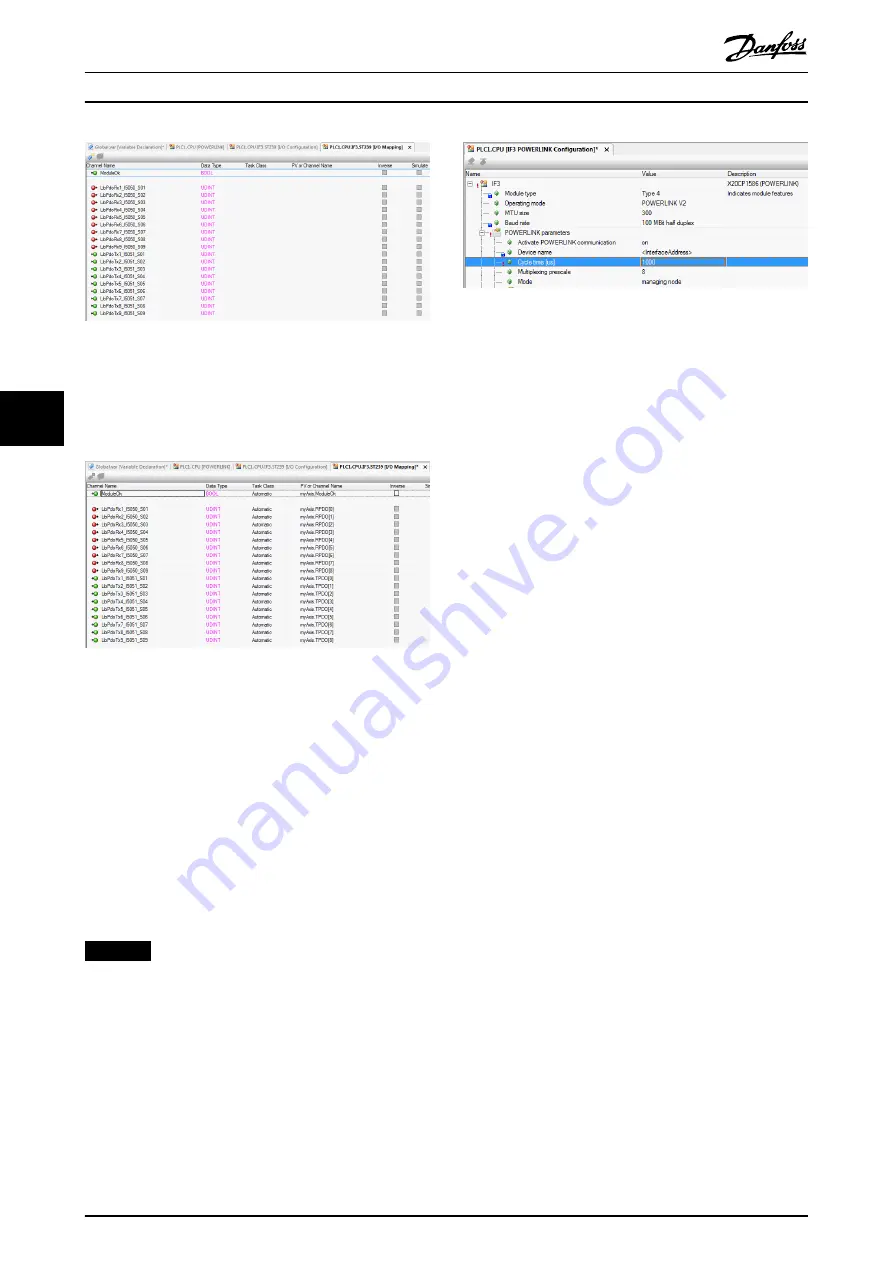
Illustration 6.6 I/O Mapping after Successful Configuration
Map the inputs and outputs of the instance of the
AXIS_REF_ISD51x
function block and the physical data
points of the servo drive according to
(here
myAxis
is an instance of
AXIS_REF_ISD51x
):
Illustration 6.7 I/O Mapping of an ISD 510 Servo Drive
Map the inputs and outputs of the instance of the
SAB_REF
function block and the physical data points of the SAB
accordingly.
Cycle time settings
The minimum cycle time is 400 µs. The ISD 510 devices
can run Ethernet POWERLINK
®
cycle times in multiples of
400 µs and multiples of 500 µs. The devices are automat-
ically parameterized by the PLC on start-up, depending on
the Ethernet POWERLINK
®
configuration of the physical
interface. The Ethernet POWERLINK
®
configuration can be
accessed by right-clicking [CPU
→
Open IF3 POWERLINK
Configuration] in the
Physical View
.
NOTICE
The task cycle time of the PLC program should be the
same as the Ethernet POWERLINK
®
cycle time. Otherwise,
data could be lost and performance may be reduced.
Illustration 6.8 Ethernet POWERLINK
®
Configuration Window
to Parameterize Ethernet POWERLINK
®
Cycle Time
Set the PLC cycle time in Automation Studio
™
:
1.
Right-click [CPU
→
Open Software Configuration]
in the
Physical View
.
2.
Ensure that the PLC cycle time is the same as the
Ethernet POWERLINK
®
cycle time.
6.4.1.3 Connecting to the PLC
Information on how to connect to the PLC can be found in
detail in the Automation Studio
™
Help. Open the
B&R Help
Explorer
and go to [Automation Software
→
Getting Started
→
Creating programs with Automation Studio
→
First
project with X20 CPU
→
Configure online connection].
6.4.2 Programming with TwinCAT
®
6.4.2.1 ISD Deliverables
To integrate the servo drive and the SAB into a TwinCAT
®
project, the following files are needed:
•
Library for the ISD 510 servo system:
Danfoss_VLT_ISD_510.lib
•
ESI file (EtherCAT
®
Slave Information) for the
servo drive and the SAB:
Danfoss ISD 500.xml
6.4.2.2 Creating a TwinCAT
®
Project
Information on how to install TwinCAT
®
can be found in
detail in the Beckhoff Information System
(infosys.beckhoff.com). Open the information system and
select [TwinCAT 2
→
TwinCAT Quick Start
→
Installation].
Information on how to create a new project in TwinCAT
®
can be found in detail in the Beckhoff Information System
(http://infosys.beckhoff.com). Open the information system
and select [TwinCAT 2
→
TwinCAT Quick Start or TwinCAT 2
→
TX1200 TwinCAT PLC
→
TwinCAT PLC Control].
Commissioning
VLT
®
Integrated Servo Drive ISD
®
510 System
48
Danfoss A/S © 12/2015 All rights reserved.
MG75K102
6
6







































































