

























Dinverter
A
User Guide
Issue code: d2au9
79
Monitoring
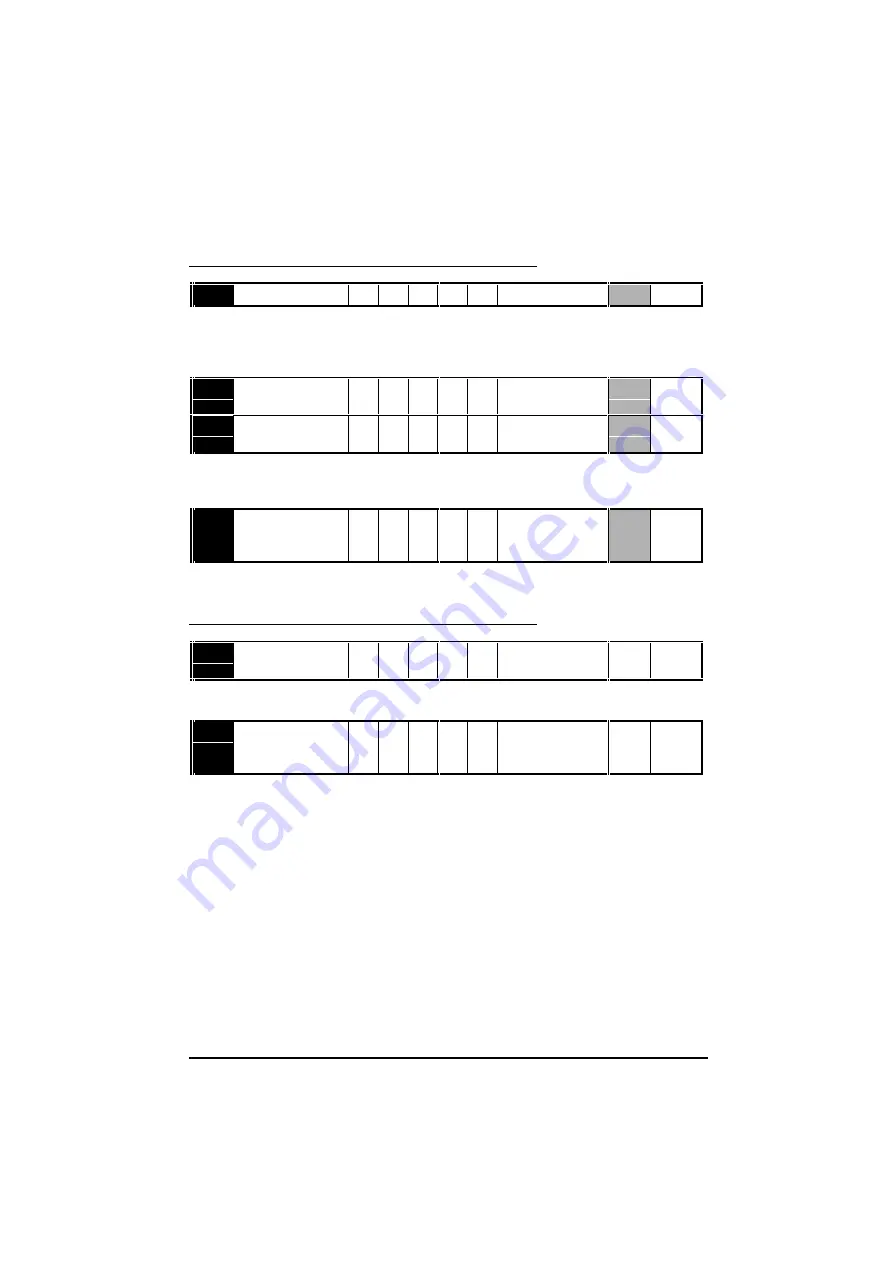
0.10
Motor frequency
RO
Bi
0 ~
≈
[0.02]
Hz
The value of
0.10
is displayed by default when the Drive is running. To
select a different parameter to be displayed when the Drive is running,
see
0.38
initial parameter displayed selector
.
0.11
Pre-ramp speed
reference
RO
Bi
±
[0.02]
Hz
0.12
Post-ramp speed
reference
RO
Bi
≈
±
[0.02]
Hz
0.11
and
0.12
indicate the speeds before and after the acceleration and
deceleration ramps.
0.13
Load-current
(real/active
component)
RO
Bi
±
[0.43]
×
[0.46]
A
0.13
indicates the value of the torque-producing current in the motor.
Deceleration selectors
0.14
Jog speed
reference
RW
Uni 0 ~ 400
Hz
1.5
(See the
Dinverter
A
Technical Reference Manual
.)
0.15
Deceleration/
braking mode
selector
RW
Txt Std (0)
Fst (1)
Std
(0)
Set at
Std
(0) when maximum braking is demanded from the Drive. This
setting selects
deceleration with ramp-hold
. If motor regeneration causes
the
DC
-bus voltage to reach its upper limit, the deceleration ramp is held
until the
DC
-bus voltage reduces sufficiently. The ramp then continues until
the next time the
DC
-bus voltage reaches its limit, resulting in maximum
deceleration occurring in steps.
Set at
Fst
(1) for deceleration to be continuous under maximum braking
conditions. This setting selects
deceleration with no ramp hold
. This can
give faster deceleration but causes more regenerated power to be
dissipated which could cause the Drive to trip due to over-voltage.







































































