



















43
%
Output
% +10
Error 0
-10
Time
}
}
A
B
C
Fig. 5
A
B
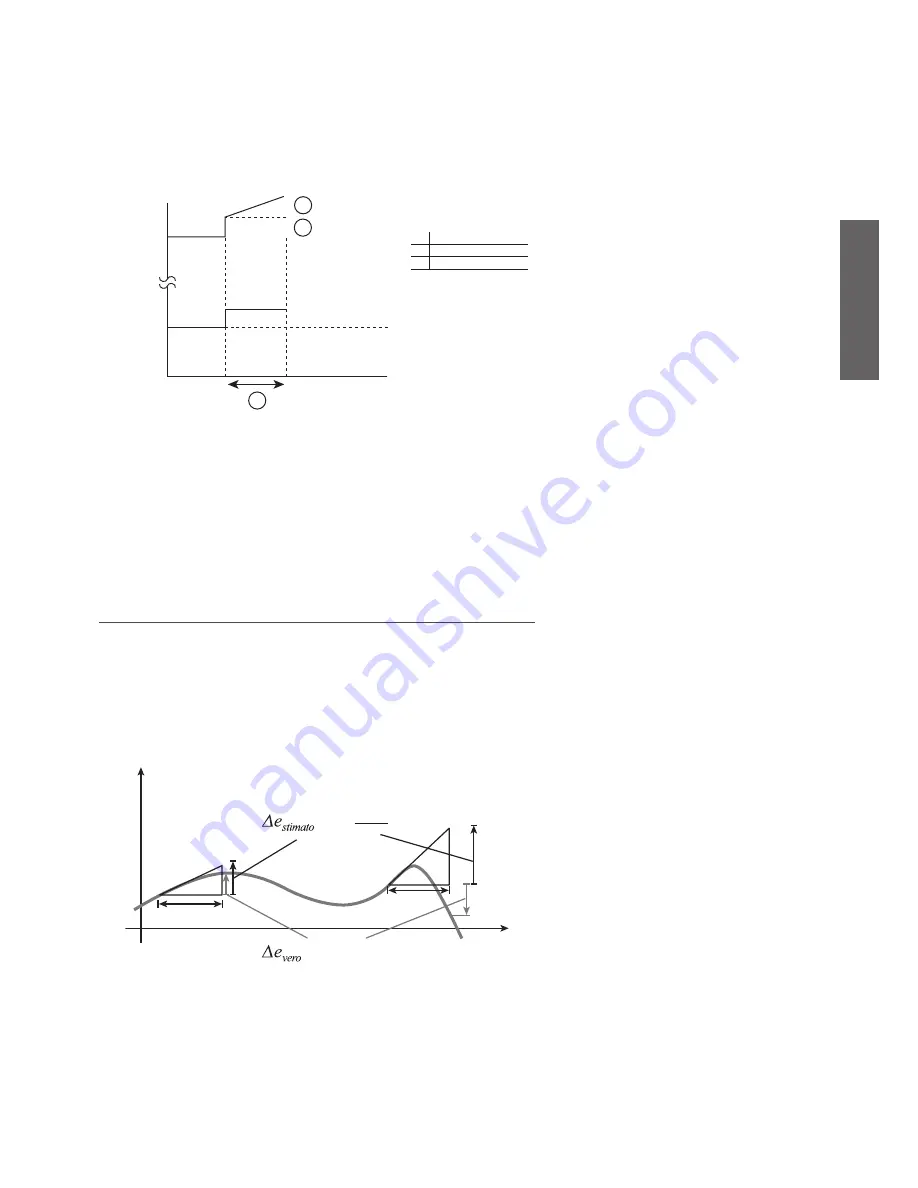
de(t)
= e(t+T
d
)-e(t)
= T
d
dt
e(t)
T
d
T
d
t
Fig. 6
ENGL
ISH
EVD
4
+030220227 - rel. 2.1 - 12.06.2008
integral action. It is almost always the integral action that dominates the way in which the system reaches
steady operation.
The integral action by defi nition does not make “jumps” and therefore is the slowest to react. Indeed, it
has almost no effect during the initial transient periods: these periods are dominated by the other two
actions. To defi ne the integral time, the PI action is considered:
u(t)= K
p
e(t) + K
i
∫e(t)dt
and the response of the two terms to the step change (i.e. +10%), as shown in the fi gure:
Integral time (reset time, integral constant or doubling time) is defi ned as the time required for the
response of the I part to be equal to that of the P part. That is, the total response to the step change is
double the value of the proportional part alone.
In the case of the SH PID, the integral time depends on the type of evaporator (plate, tube bundle, ...)
and the thermal inertia of the circuit; the more ‘reactive’ the system, the lower the contribution of the
integral action must be.
IV.V Derivative action
EFFECT OF Td
Increasing the value of the derivative time Tp decreases swings, however there may be
fl uctuations around the set point.
The derivative action makes the control depend on the “future” of the error, that is, on the direction it is
moving in and the speed it varies. In fact, the derivative action calculates an estimate for the error after t
seconds based on the trend of the curve at the instant t (see the following fi gure) and therefore ensures
that control will depend on a prediction of the error Td at a future instant of time.
The derivative action “tries to understand where the error is going and how fast it is moving” and reacts
as a consequence; the parameter Td determines how far into the future the prediction is made.
The derivative action is the fastest to react (including to measurement noise, unfortunately) and is only
helpful if the prediction is good, that is, if Td is not too high compared to the temporal changes in the
error: the difference can be seen by examining cases A and B in the fi gure.
The derivative action is ideally null in steady state, however in reality it follows and tends to amplify
the measurement noise; therefore, it is only useful in the initial transient periods. It may be very useful,
however it is also dangerous, above all if the measurement of the controlled variable is noisy.
Key
A
integral action
B
proportional action
C
Ti integral action time
Summary of Contents for EVD4
Page 1: ...EVD4 Driver for electronic expansion valve User manual...
Page 2: ......
Page 3: ...User manual...
Page 6: ...6...
Page 44: ...44...
Page 47: ......