

















CDE360 Vector Control AC Drive Introduction
2.3) Configure the following parameters according to the motor nameplate and actual requirements.
Function
Code
Name
Unit
Function
Code
Name
Unit
b0.04
Acceleration time 1
Sec
b0.08
Rated motor current
A
b0.05
Deceleration time 1
Sec
b0.09
Rated motor frequency
Hz
b0.06
Rated motor power
KW
b0.10
Rated motor speed
RPM
b0.07
Rated motor voltage
V
2.4) Set running frequency by adjusting the signal level of AI1.
2.5) The AC drive will run forward when the switch K1 is closed, and run reverse when the K2 is
closed. If the K1 and K2 are both in closed or open status, the AC drive will stop.
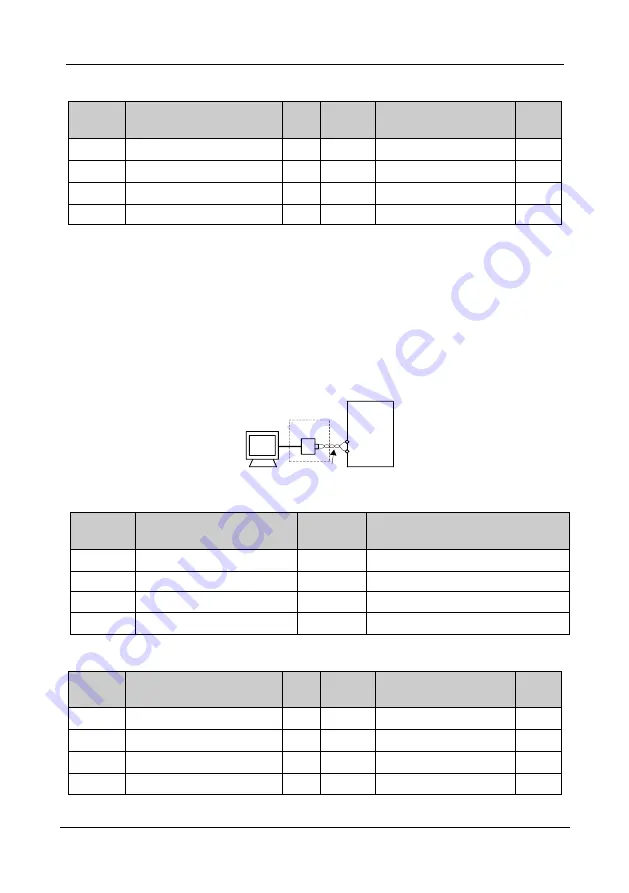
Example 3: Start/stop the AC drive and set frequency through communication (Modbus RTU
protocol, RS485 interface)
Operating steps:
3.1) Connect the control device to the AC drive directly if it supports RS485 interface. Otherwise,
please add an communication adapter box.
485+
485-
AC
drive
Adapter
Controller
Twisted pair
3.2) Configure the following communication related parameters.
Function
Code
Name
Value
Meaning
b0.11
Command sources selection
2
Commands from the communication.
L0.00
Communication baud rate
1 (default)
9600 bps
L0.01
Data format
1 (default)
No check, 8-N-2 data format
L0.02
Slave address
1 (default)
3.3) Configure the following parameters according to the motor nameplate and actual
requirements..
Function
Code
Name
Unit
Function
Code
Name
Unit
b0.04
Acceleration time 1
Sec
b0.08
Rated motor current
A
b0.05
Deceleration time 1
Sec
b0.09
Rated motor frequency
Hz
b0.06
Rated motor power
KW
b0.10
Rated motor speed
RPM
b0.07
Rated motor voltage
V







































































