





























CDE360 Vector Control AC Drive Chapter 6 Parameters Description
d0.06
Range: 0 ~ 30%
Default: Model dependent
Torque boost
0: auto torque boost
>0: fixed torque boost
When this parameter is set to 0, output voltage shall be adjust
automatically based on the changing of the load.
When this parameter is greater than 0, the value that output voltage
increase shall be depend on this setting.
d0.07
①
Range: 0.00 ~
(
b0.00
)
Default: 37.00
Cut-off frequency
of torque boost
Unit: Hz
This parameters determine the range that torque boost is valid.
d0.08
Range: 0.0% ~ 100.0%
Default: 0.0%
V/f slip
compensation
gain
Setting this parameter can help to compensate the motor speed change in
case of load change. When this parameter is set to 100%, it means rated
motor slip shall be used for compensation under rated load. The rated
motor slip is calculated from rated motor frequency and rated motor
speed. Therefore, correct motor parameter setting is required.
d0.09
Range: 0 ~ 250
Default: 64
V/F
over-excitation
gain
It can increase flux current to exhaust the regenerating energy. It can
shorten the actual decelerating time when motor is running in
regenerating mode during deceleration. Set this parameter to 0 in case of
situations that brake resister is used or DC voltage will not rise during
motor deceleration.
d0.10
Range: 0 ~ 100
Default: Model dependent
V/F oscillation
suppression gain
When motor is oscillating, adjusting this parameter can help to improve
motor stability. It may influence V/F control performance when it set too
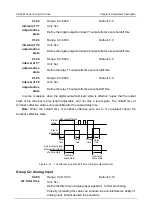
d0.11
Range: 0 ~ 100
Default: Module dependent
Overcurrent
stall gain
0: Overcurrent stall function
> 0: Enable overcurrent stall function
When the load is heavy or accelerating / decelerating time is too short,
output current exceeds the setting of d0.12, overcurrent stall function
shall adjust output frequency to avoid over current trip. After output
current declines, output frequency shall resume to reference frequency.
Generally, the larger gain the better over current suppression result will
be. At the same time, larger gain may cause oscillation.







































































