





























Removal, motor axis 5
The procedure below details how to remove motor, axis 5.
WARNING
Please observe the following before commencing any repair work on the
manipulator:
•
Motors and gears are HOT after running the robot! Touching the motors and
gears may result in burns!
•
Turn off all electric power, hydraulic and pneumatic pressure supplies to
the robot!
•
Take any necessary measures to ensure that the manipulator does not
collapse as parts are removed, e.g. secure the lower arm with fixtures if
removing motor, axis 2.
Note
Whenever parting/mating motor and gearbox, the gears may be damaged if
excessive force is used.
Note
Action
Decide which calibration routine to
use, and take actions accordingly
prior to beginning the repair proced-
ure.
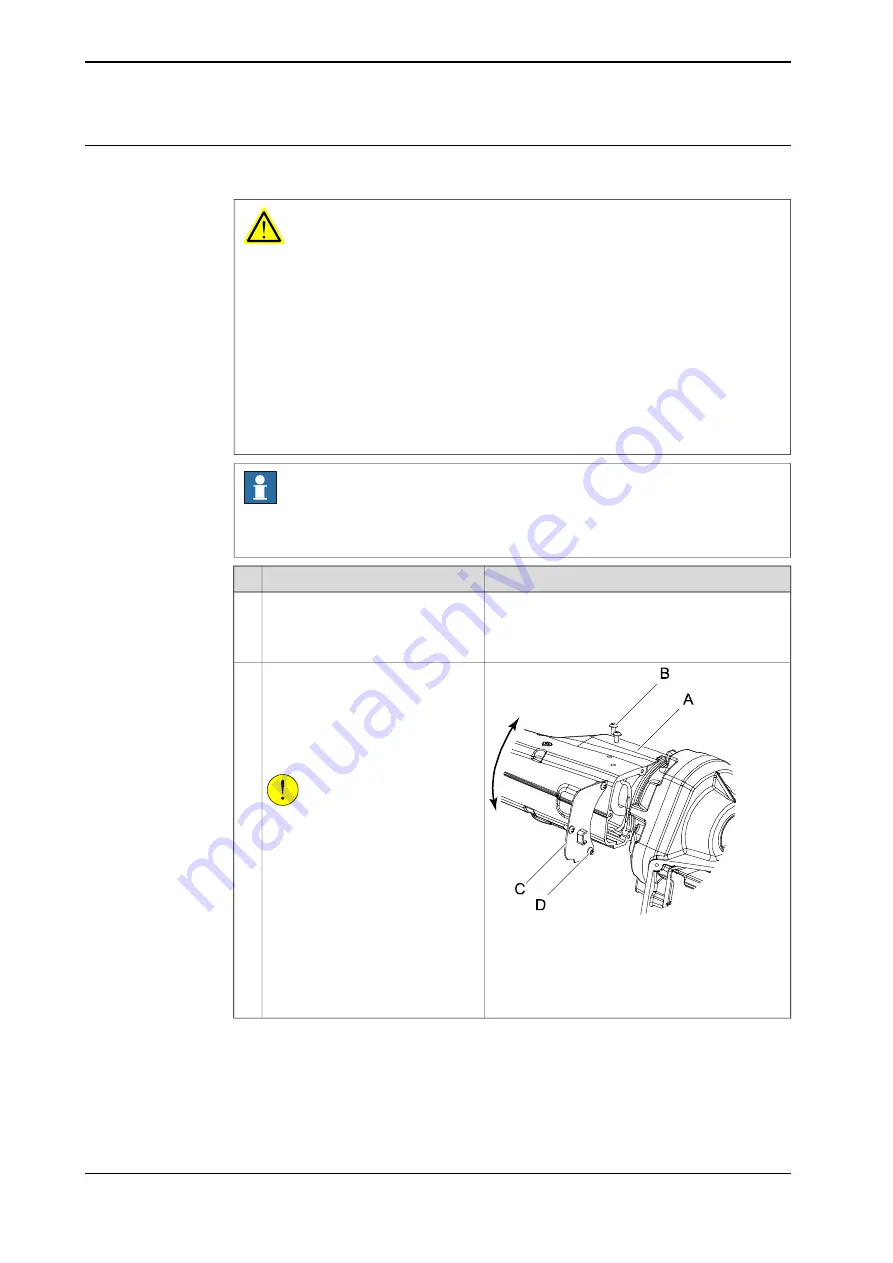
1
xx0700000083
Remove the cover (C) on the back
of the upper arm tube (A). Rotate
the upper arm to access all the
screws (D).
Remove the screws (B) holding the
cable harness.
CAUTION
After removal of the cover (mec
stop), do not rotate axis 4 do to risk
of cable harness damage.
2
A Arm Tube
B Torx pan head screw M6X12
C Cover
D Torx pan head screw M6X12
Continues on next page
296
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.6.8 Replacement of motor, axis 5, IRB 1600ID
Continued
Summary of Contents for IRB 1660
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































