

























3.10 Noise Control and Measures for Harmonic Suppression
3-49
3
Wi
ring and
C
onne
ctio
n
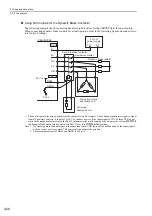
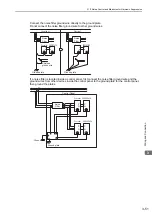
(1) Noise Filter
The multi-winding drive unit, SERVOPACKs, and converters have built-in microprocessors, so protect them
from external noise as much as possible by installing noise filters in the appropriate places.
The following is an example of wiring for noise control.
∗1.
For ground wires connected to the ground plate, use a thick wire with a thickness of at least 2.0 mm
2
(preferably,
plain stitch cooper wire).
∗2.
should be twisted-pair wires.
∗3.
When using a noise filter, follow the precautions in
3.10.2 Precautions on Connecting Noise Filter
.
(2) Correct Grounding
Take the following grounding measures to prevent the malfunction due to noise.
Grounding the Motor
Always connect servomotor frame terminal FG to the SERVOPACK ground terminal . Also be sure to
ground the ground terminal .
If the servomotor is grounded via the machine, a switching noise current will flow from the main circuit of the
SERVOPACK and converter through the stray capacitance of the servomotor. To prevent the adverse effects of
switching noise, always connect the ground terminal in the motor terminal box on the servomotor to the
ground terminal on the SERVOPACK.
Noise on the I/O Signal Cable
If the I/O signal cable receives noise, ground the 0 V line (SG) of the I/O signal cable. If the servomotor main
circuit cable is accommodated in a metal conduit, ground the conduit and its junction box. For all grounding,
ground at one point only.
Servomotor
Operating relay sequence
Signal generation circuit
(not included)
DC
power
supply
(Ground plate)
Ground: Ground to an independent ground
2.0 mm
2
min.
400 VAC
100/200 VAC
Noise filter
∗
3
2.0 mm
2
min.
2.0 mm
2
min.
U
W
V
L2
L1
L3
0 V
24 V
CN101
CN21
CN1
SERVOPACKs and converters
(2 pairs)
Multi-winding drive unit
*1
*3
*2
ENC
(FG)
M
24-VDC
power supply
+
-
Noise
filter







































































