





























xvi
183574-1CD
183574-1CD
Safety
Operation Safety
ArcWorld 50/50S and 52/
52S
Operation Safety
DANGER
• Personnel engaged in teaching or inspection, etc. of the Robot must
receive special training required by applicable laws and regulations.
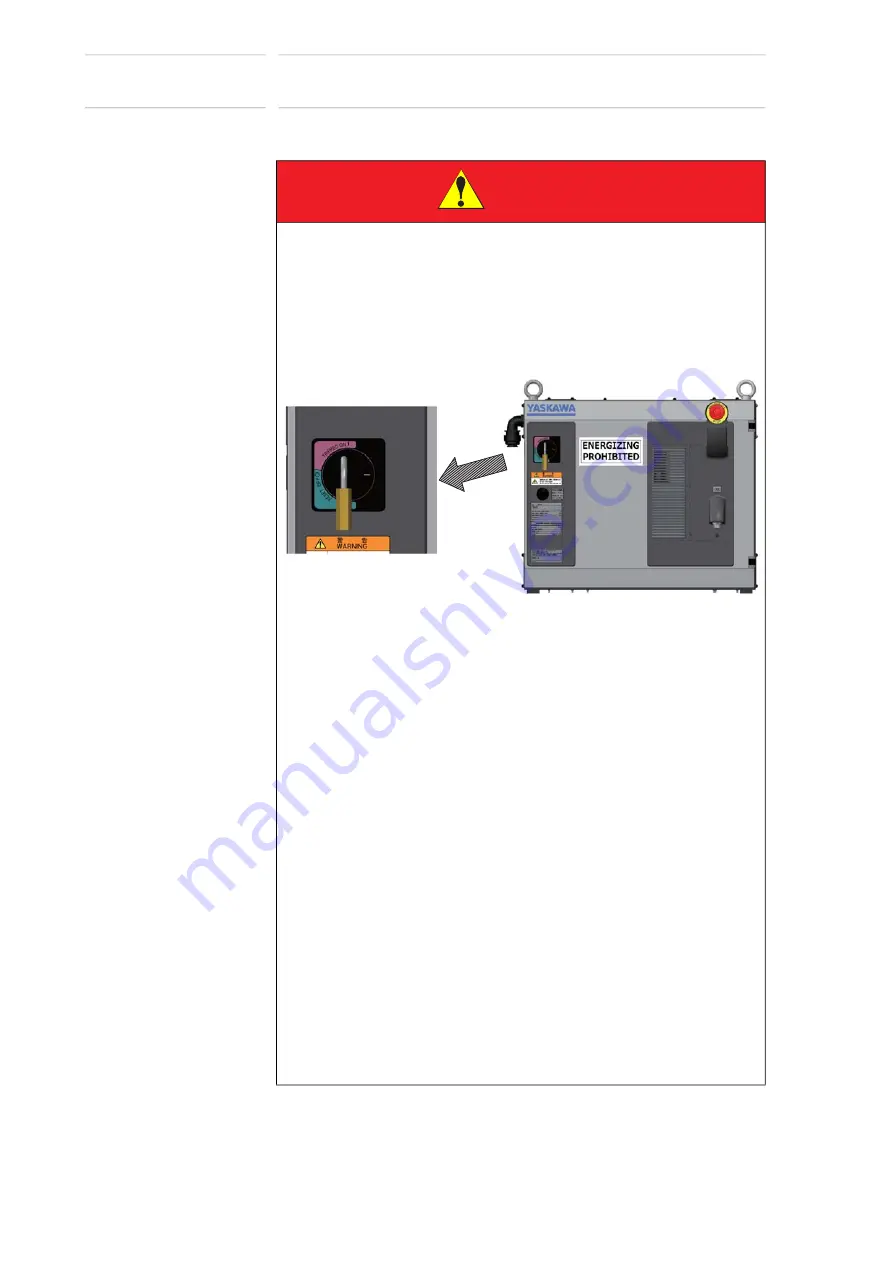
• While performing inspection and maintenance, wiring, or attaching a
tool to the Robot, etc., make sure to turn OFF the power supply of
the Controller and the tool, and keep the switch of the power supply
locked so that unauthorized personnel cannot turn ON the power
supply.
In addition, display a warning sign stating “Energizing Prohibited”.
Turning ON the power supply without due care during inspection
and maintenance, etc., may cause electric shock or unexpected
movement of the Robot, which may result in personal injury.
• Use the Robot only within the specifications described in the
manuals for the Robot.
Failure to observe this instruction may result in personal injury and/or
equipment damage.
• Observe the following precautions when performing a teaching
operation within the Robot's operating range:
– Be sure to perform lockout by putting a lockout device on the
safety fence when going into the area enclosed by the safety
fence. In addition, the operator of the teaching operation must
display the sign that the operation is being performed so that no
other person closes the safety fence.
– View the Robot from the front whenever possible.
– Always follow the predetermined operating procedure.
– Always keep in mind emergency response measures against the
Robot’s unexpected movement toward a person.
– Ensure a safe place to retreat in case of emergency.
Failure to observe this instruction may cause improper or unintended
movement of the Robot, which may result in personal injury.
YRC1000
16 of 126







































































