



















5-27
CHAPTER 5 Periodic Inspection
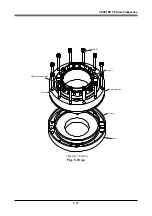
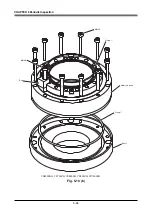
3. R-axis
1) Prepare the following tools and items.
• Harmonic grease 4B No.2
• Waste cloth (rag)
• Phillips screwdriver
• Hex wrench set
• Screw Lock (thread sealant)
• Torque wrench
• Hook wrench
• Replacement parts (See table below.)
Replacement parts
Parts name
Type No.
YAMAHA Parts No.
Note
Harmonic drive
Edge seal
SHF-17-30
KBF-M1821-000
Lower part of harmonic drive
O-ring
q
Rubber wire diameter 1.78mm
×
Ring inner diameter 63.22mm
KN4-M1896-000
w
Rubber wire diameter 0.80mm
×
Ring inner diameter 45.40mm
V-25A (N+C)
KN3-M257L-000
KBF-M1886-000
Supplied with harmonic drive
e
Rubber wire diameter 1.00mm
×
Ring inner diameter 35.3mm
90990-17J031
Spline nut
r
Rubber wire diameter 1.00mm
×
Ring inner diameter 46.00mm
90990-17J032
Y-axis arm
t
Rubber wire diameter 0.60mm
×
Ring inner diameter 22.00mm
90990-17J033
Wave generator
FORSHEDA
YK500XG, YK600XG
Replacement parts
Parts name
Type No.
YAMAHA Parts No.
Note
Harmonic drive
Edge seal
SHF-20-50
KBP-M1821-000
Lower part of harmonic drive
O-ring
q
S71(JIS)
KN3-M2159-000
w
Rubber wire diameter 0.99mm
×
Ring inner diameter 53.28mm
V-28A (N+C)
KN3-M2144-000
KBP-M1886-000
Supplied with harmonic drive
e
Rubber wire diameter 1.00mm
×
Ring inner diameter 43.00mm
90990-17J036
Spline nut
r
Rubber wire diameter 1.30mm
×
Ring inner diameter 53.00mm
90990-17J038
Y-axis arm
t
Rubber wire diameter 0.5mm
×
Ring inner diameter 28.00mm
90990-17J037
Wave generator
FORSHEDA
YK600XGH, YK700XG, YK800XG, YK900XG, YK1000XG
2) Turn off the controller.
3) Place a sign indicating that the robot is being inspected, to keep others from
operating the controller switch.
4) Enter the safeguard enclosure.
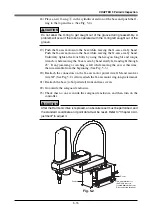
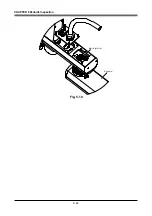
5) Remove the cover. (See Fig. 5-13.)
Unplug the connectors on the R-axis motor power wire RM and resolver
wire RP in the Y-axis arm. Also disconnect the R-axis motor ring-tongue
terminal.
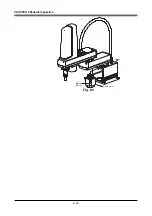
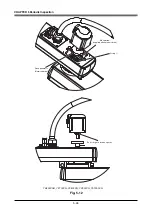
WARNING
The Z-axis will slide down when the bearing mounting bolts are removed in the
next step, causing a hazardous situation. Prop the Z-axis with a support stand
before loosening these bolts. (See Fig. 5-14.)
Содержание YK-X Series
Страница 1: ...User s Manual ENGLISH E YAMAHA SCARA ROBOT E35 Ver 1 08 YK XG YK X series ...
Страница 2: ......
Страница 6: ...MEMO ...
Страница 10: ...MEMO ...
Страница 12: ...MEMO ...
Страница 29: ...CHAPTER 2 Functions 1 Robot Manipulator 2 1 2 Robot Controller 2 3 3 Robot initialization number list 2 4 ...
Страница 30: ...MEMO ...
Страница 36: ...MEMO ...
Страница 46: ...3 10 CHAPTER 3 Installation Ground symbol M4 Ground terminal Fig 3 6 Ground terminal ...
Страница 64: ...3 28 CHAPTER 3 Installation Hole diameter Bolt Slot Spline shaft End effector or stay Fig 3 27 ...
Страница 78: ...3 42 MEMO ...
Страница 80: ...MEMO ...
Страница 91: ...4 11 CHAPTER 4 Adjustment X axis origin sensor stay X axis origin sensor Bolt Cover q w Fig 4 3 b ...
Страница 101: ...4 21 CHAPTER 4 Adjustment Cover Elongated hole Y axis origin sensor stay Bolt Fig 4 8 a ...
Страница 102: ...4 22 CHAPTER 4 Adjustment Dog Hex nut Fig 4 8 b Bolt Y axis arm X axis arm Fig 4 8 c ...
Страница 106: ...4 26 CHAPTER 4 Adjustment R axis origin dog Bolt R axis origin sensor stay R axis origin sensor q w Cover Fig 4 9 ...
Страница 119: ...4 39 CHAPTER 4 Adjustment R End effector End effector Z Y X Fig 4 18 ...
Страница 120: ...4 40 MEMO ...
Страница 122: ...MEMO ...
Страница 138: ...5 16 CHAPTER 5 Periodic Inspection M6 16 M5 16 X axis motor Base Fig 5 3 ...
Страница 146: ...5 24 CHAPTER 5 Periodic Inspection M3 16 M4 18 X axis arm Fig 5 10 ...
Страница 155: ...5 33 CHAPTER 5 Periodic Inspection O ring r M5 14 M6 16 R axis motor Fig 5 17 ...
Страница 156: ...5 34 CHAPTER 5 Periodic Inspection M3 14 M3 16 O ring w Fig 5 18 ...
Страница 161: ...CHAPTER 6 Increasing the robot operating speed 1 Increasing the robot operating speed 6 1 ...
Страница 162: ...MEMO ...
Страница 168: ...6 6 MEMO ...
Страница 170: ...MEMO ...
Страница 177: ...MEMO ...







































































