




























82
Parameterizing
WAGO-I/O-SYSTEM 750
750-636/000-x00 DC Drive Controller 24V/5A
Manual
Version 2.1.0
8.6.11 CurrentLimit_PWM, CurrentControl_PWM
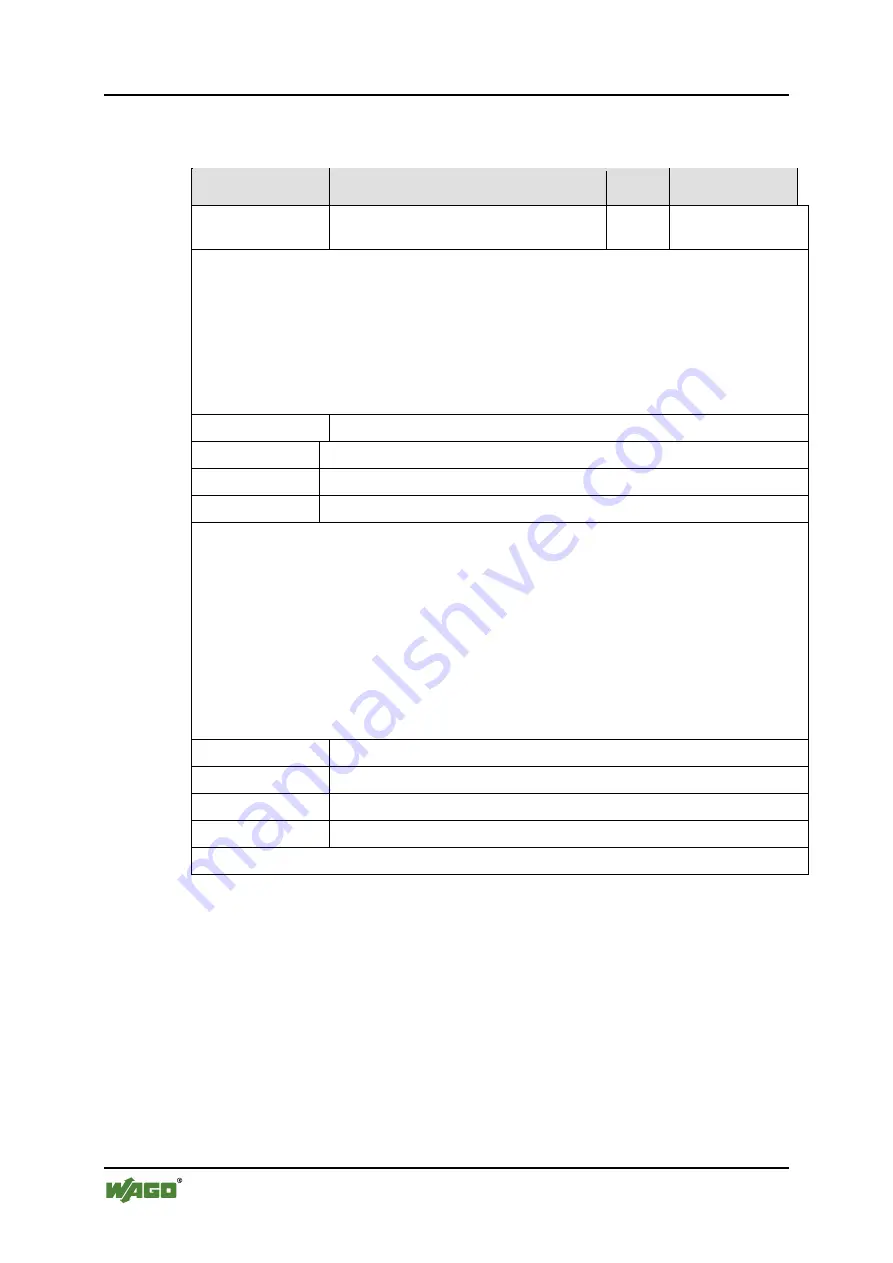
Table 49: 2.2.3 CurrentLimit_PWM, CurrentControl_PWM
Parameter address Function
Access Factory default
setting
12
CurrentLimit_PWM
CurrentControl_PWM
R/W
0xB4AF
Bit 0 ... 7: CurrentLimit_PWM [0 ... 200]
CurrentLimit_PWM configures a pulse-duty factor for the PWM signal for motor control.
The CurrentLimit_PWM described here is set at the motor final stage from the DC drive controller
during a positioning operation in the start phase for a specific duration. The ON time of the PWM is
governed by the respective parameter CurrentLimit_Time and generally starts with the end of the
start ramp. To enable the CurrentLimit_PWM function not only requires that the pulse-duty factor is
greater than 0, but also that the CurrentLimit_Time has a value greater than 0.
More information about CurrentLimit_PWM is available in the chapter "Function Description" >
"PWM Control during Positioning".
0:
CurrentLimit_PWM function is disabled.
1 ... 200:
PWM pulse-duty factor 0.5% ... 100% with a resolution 0.5%
201 ... 255:
PWM pulse-duty factor 100%
175:*
PWM pulse-duty factor 87.5%
Bit 8 ... 15: CurrentControl_PWM [0 ... 200]
CurrentControl_PWM configures a pulse-duty factor for the motor control PWM signal.
CurrentControl_PWM is set at the motor final stage on two conditions. First, during a 'MovePos' or
'MoveNeg' motion, the 'CurrentControl_ON' control bit is set to high or on certain conditions during
a positioning operation.
With the simple MovePos and MoveNeg move commands, it is possible to change the
CurrentControl_PWM during the positioning operation within the range of 1% ... 99%. To stop the
drive safely, it is required to cancel the move command and for 100% the CurrentControl_ON bit
needs to be reset.
The CurrentControl_PWM serves to reduce the power e.g. for the creep travel.
More information about CurrentControl_PWM is available in the chapter "Function Description" >
"PWM Control during Positioning".
0:
CurrentControl_PWM function is disabled.
1 ... 200:
PWM pulse-duty factor 0.5% ... 100% with a resolution 0.5%
201 ... 255:
PWM pulse-duty factor 100%
180:*
PWM pulse-duty factor 90%
* Default settings







































































