





























UNIFREM v.3.41x
10 May 2017
Page 63 from 180
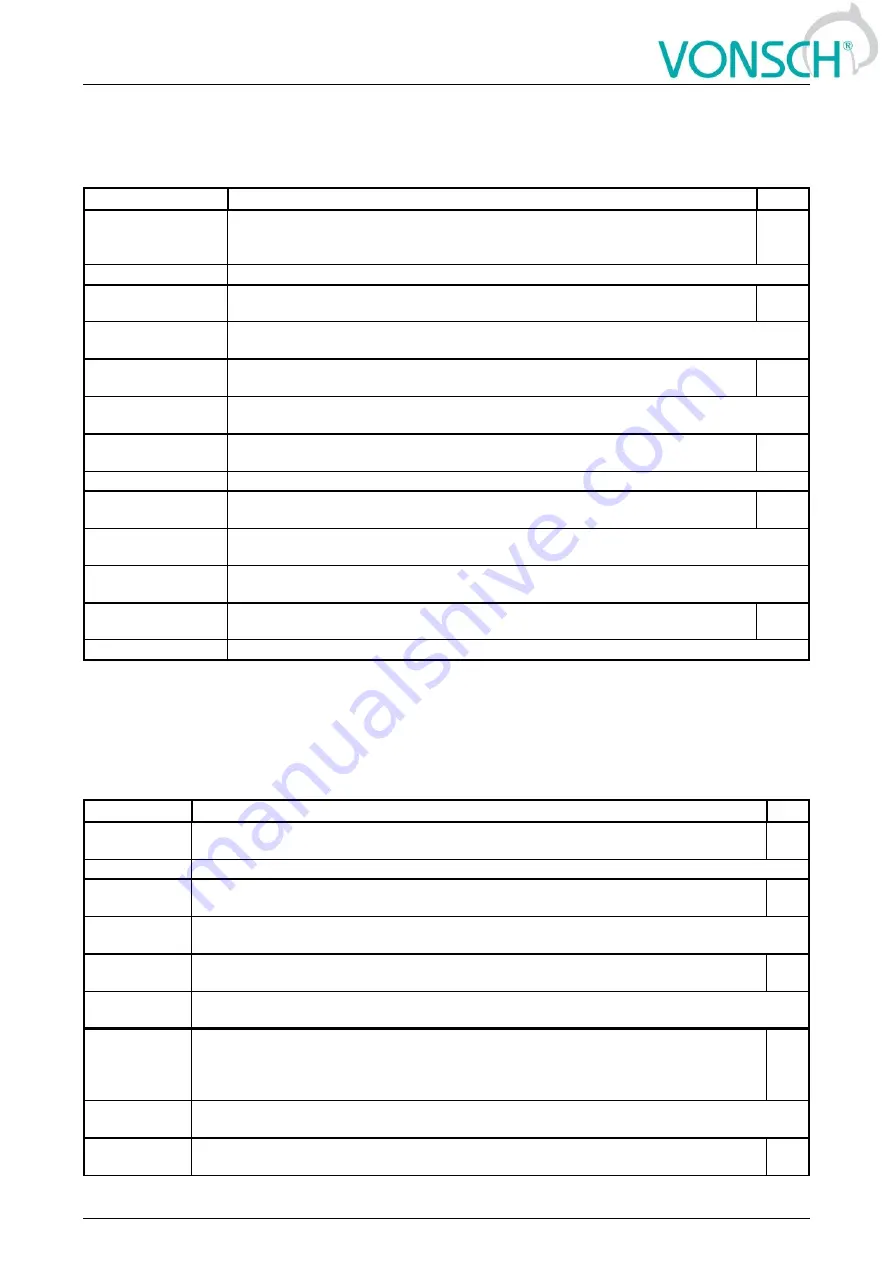
FLUX CONTROLLER (MFC)
Group of parameters number [444]
Magnetic flux controller. Stable value of magnetic flux is required for the control. MFC is inactive in the field
weakening zone.
MENU \ SETTINGS \ CONTROL AND REGULATION \ VECTOR CONTROL \ FLUX CONTROLLER (MFC)
Name [ID]
Description
Def.
MFC damping [448]
Damping coefficient of the magnetic flux controller. Decreasing the value
increases the magnetic flux loop control speed at the cost of a higher
overshoot.
1,00
0,00 ÷ 3,00
MFC
dynamics
[456]
Magnetic flux controller dynamics - frequency bandwidth.
15 Hz
1 ÷
Magnetic
Flux
setpoint [452]
Value of the rotor magnetic flux. Proper value of the flux setpoint is close to
Nom. voltage [59] (page 44) / Nom. frequency [4] (page 44).
1,270
Wb
0,100 Wb ÷ 5,000
Wb
Flux ramp [454]
Change slope of the flux setpoint. This time represents the time,required to
change the flux setpoint by 1 Wb.
0,40 s
0,10 s ÷ 50,00 s
Flux
optimization
[924]
Rotor magnetic flux optimization.
□ Min. losses
Flux optimization is set to minimalize losses. However, the overal performance and the
dynamics of the motor can be decreased.
□ Max. torque
Flux optimization is set to maximalize the torque. Motor can be excited to high flux
levels.
Opt.
min.
Flux
[1485]
Minimum flux value during minimum losses flux optimization.
40,0 %
1,0 % ÷ 100,0 %
SPEED CONTROLLER (SC)
Group of parameters number [445]
Speed controller. The feedback for closed vector control is taken from the parameter Speed source [1000]
(page 58). Open (sensorless) vector control uses mathematical model for speed/position calculation.
MENU \ SETTINGS \ CONTROL AND REGULATION \ VECTOR CONTROL \ SPEED CONTROLLER (SC)
Name [ID]
Description
Def.
SC
Damping
[449]
Speed controller damping coefficient. Decreasing the value increases the speed
control loop bandwidth at the cost of a higher overshoot.
1,00
0,00 ÷ 10,00
SC Dynamics
1 [457]
Speed controller dynamics (frequency bandwidth), used for frequency lower than
Dynamics break [1129] (page 63) .
1,00
Hz
0,01
÷
SC Dynamics
2 [1128]
Speed controller dynamics (frequency bandwidth), used for frequency higher than
Dynamics break [1129] (page 63) .
1,00
Hz
0,01
÷
Dynamics
break [1129]
Frequency below which SC Dynamics 1 [457] (page 63) is used, SC Dynamics 2
[1128] (page 63) is used above this frequency. It is mainly used for increasing the
dynamics of speed control at low speed. By setting this to zero value, SC Dynamics 2
[1128] (page 63) will always be used.
0,0
Hz
0,0
÷
Min.
freq.
setpoint [1231]
Minimum frequency, which the speed setpoint shall enter in static and dynamic states.
0,00
Hz
Содержание Quatrofrem Series
Страница 2: ...UNIFREM v 3 41x 10 May 2017 Page 2 from 180...
Страница 127: ...UNIFREM v 3 41x 10 May 2017 Page 127 from 180...





















































