





























92
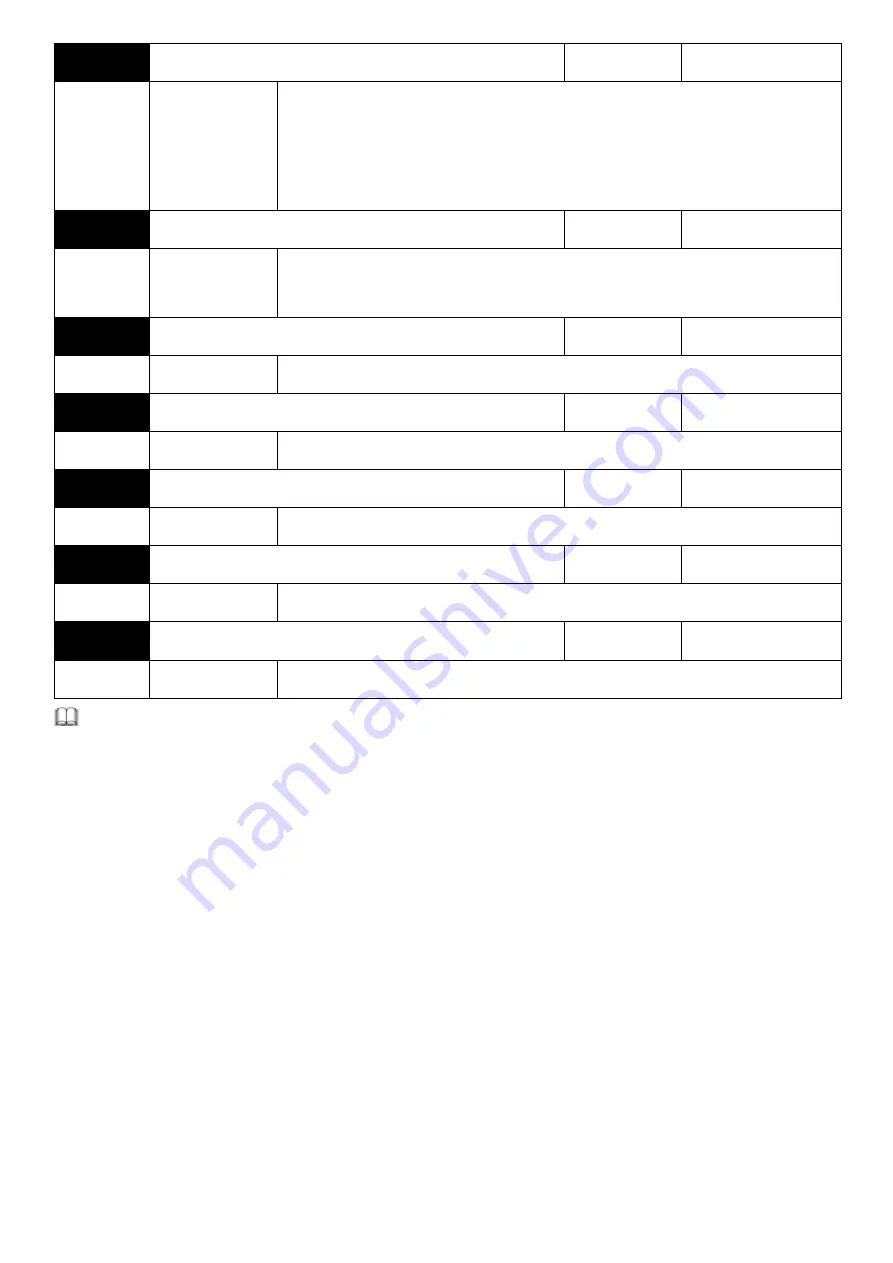
P1.61
Gain switch cause
Default value
1
Setting range
0: Position deviation (x10)
1: Feedback speed
2: Command speed
3: External switch (EI signal switch)
P1.62
Gain switch level
Default value
50
Setting range
P1.61 = 0: 1~1000 [pulse]
P1.61 = 1, 2: 1~1000 [r/min]
P1.63
Gain switch time constant
Default value
1
Setting range
0~100 [ms]
P1.64
Position loop gain 2
Default value
100
Setting range
30~200 [%]
P1.65
Speed loop gain 2
Default value
100
Setting range
30~200 [%]
P1.66
Speed loop integration time constant 2
Default value
100
Setting range
30~200 [%]
P1.67
Feed forward gain 2
Default value
100
Setting range
30~200 [%]
The gain of the servo system is switched from the first gain (P1.55 to 58) to the second gain (P1.64 to 67).
Noise and vibration during stoppage can be reduced through gain switching.
Select the gain switch cause with P1.61.
The unit of the reference value of the second gain (P1.64 to 67) is "%." Specify the ratio to the first gain.
[Example] If P1.56 (speed loop gain 1) is 100 Hz and P1.65 (speed loop gain 2) is 80%, the
second gain is 80 Hz.
P1.64 (position loop gain 2) is similar. If P1.57 (speed loop integration time constant 1) is 20 ms and
P1.66 (speed loop integration time constant 2) is
50%, integration time constant 2 is 40 ms.







































































