





























146
·Overload warning detection: (Reference value 27)
The signal is turned on if the servomotor load factor is at the reference value.
A warning can be issued before the servomotor is suddenly stopped due to an overload alarm or similar.
The signal is turned on if the load factor of the servo motor reaches the overload warning level of P2.70
(overload warning value).
The signal is automatically turned off if the factor falls below the overload warning level. (There is no way to
reset with EIn signal.)
The signal can be issued before the servo motor drive trips due to an overload alarm.
·Servo control ready [S-RDY]: (Reference value 28)
Use the signal to check that the servo motor drive and servo motor operate correctly.
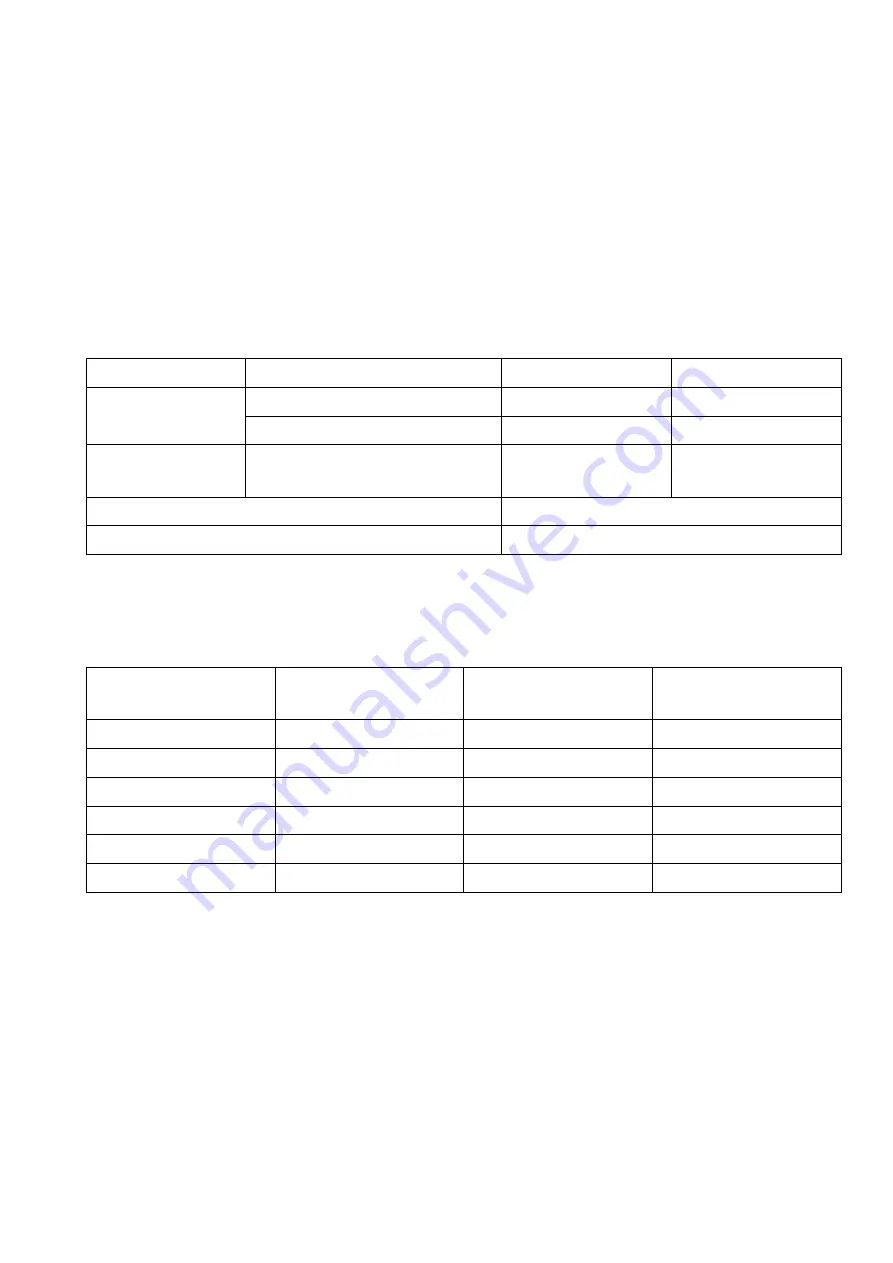
The servo control ready signal remains turned on while the conditions listed in the table below are satisfied.
Signal division
Signal name
Function No.
Signal status
EI input
Forced stop [EMG]
10
ON
Free-run [BX]
54
OFF
EOUT output
Alarm detection (Normally open
contact)
16
OFF
The internal CPU operates correctly.
-
The R, S, T terminals are turned on.
-
·Edit permission response: (Reference value 29)
After the edit permission assigned to a EIn input signal is on, under some conditions, the "edit permission
response command" is turned on. The conditions are listed in the table below.
Edit permission
P2.74
Parameter change
operation
Edit permission
response
Not assigned
0: Write enable
Possible
ON
OFF
0: Write enable
Impossible
OFF
ON
0: Write enable
Possible
ON
Not assigned
1: Write protect
Impossible
OFF
OFF
1: Write protect
Impossible
OFF
ON
1: Write protect
Impossible
OFF
·Data error: (Reference value 30)
The signal is turned on if the address and data are incorrect (drifting beyond the specification limit) when
performing teaching.
·Address error: (Reference value 31)
The signal is turned on when deviation from the positioning data number range and speed data range (at start)
is detected.
The signal is turned on if the start positioning is turned on while AD3 through AD0 are turned off with P2.41
(sequential start selection) being “0” (disable).
Start operation with a correct positioning data number to turn the signal off.







































































