





























124
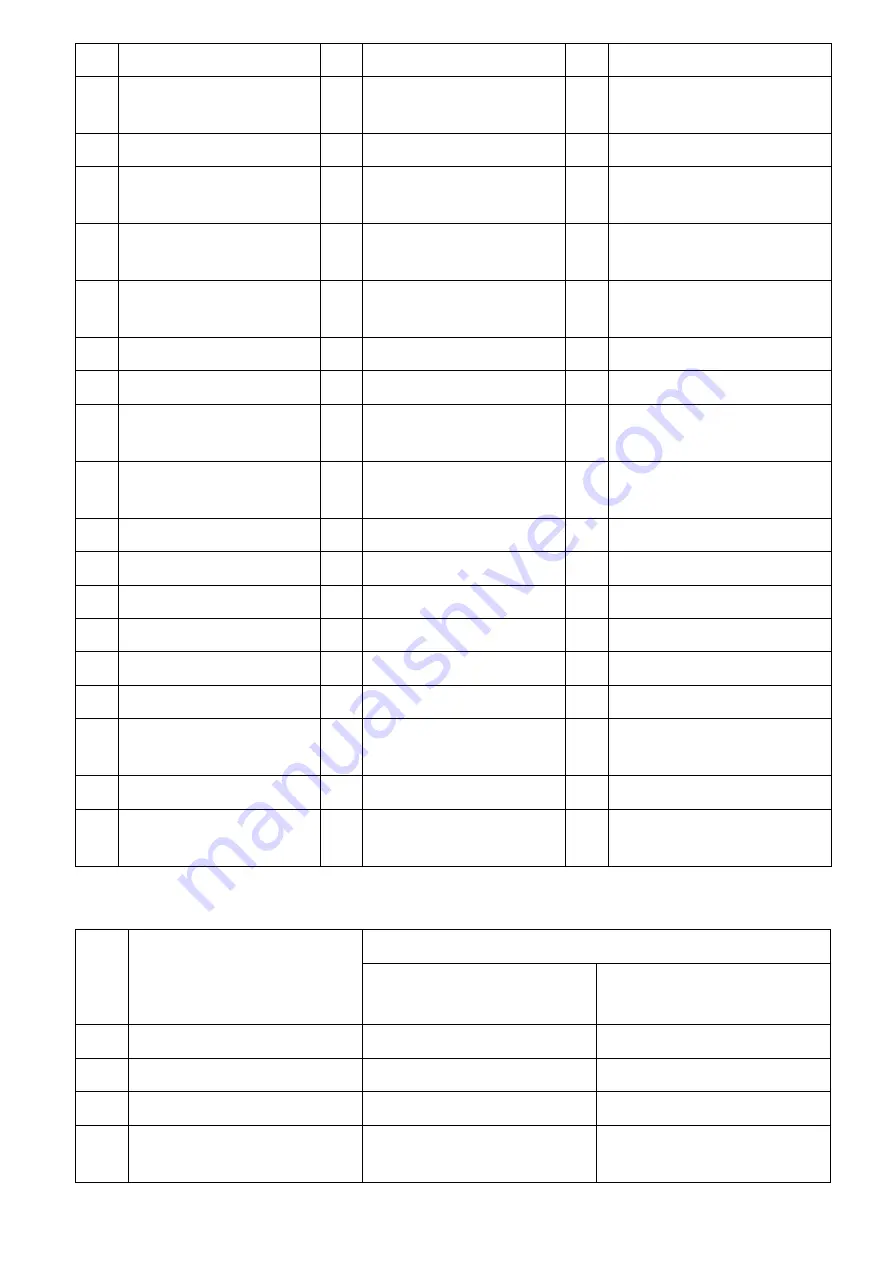
No.
Name
No.
Name
No.
Name
1
Servo-on [S-ON]
25
Electronic gear numerator
selection 1
49
Interrupt input
2
Forward command [FWD]
26
Command pulse inhibit
50
Deviation clear
3
Reverse command [REV]
27
Command pulse ratio 1
51
Multi-step speed selection
1[X1]
4
Start positioning [START]
28
Command pulse ratio 2
52
Multi-step speed selection
2[X2]
5
Homing [ORG]
29
Proportional control
53
Multi-step speed selection
3[X3]
6
Home position LS[LS]
31
Pause
54
Free-run
7
+OT
32
Positioning cancel
55
Edit permission
8
−OT
34
External regenerative
resistor overheat
57
Anti resonance frequency
selection 0
10
Forced stop [EMG]
35
Teaching
58
Anti resonance frequency
selection 1
11
Alarm reset [RST]
36
Control mode selection
60
AD0
14
ACC0
37
Position control
61
AD1
16
Position preset
38
Torque control
62
AD2
17
Servo response switch
43
Override enable
63
AD3
19
Torque limit 0
44
Override 1
70
Pulse speed command
20
Torque limit 1
45
Override 2
77
Positioning data selection
22
Immediate value
continuation
46
Override 4
78
Broadcast cancel
23
Immediate value change
47
Override 8
24
Electronic gear numerator
selection 0
48
Interrupt input enable
The logic of the following signals differs between those assigned to hardware EI signals (EI 1 to 8) and those to
communications EI signals (EI 9 to 24).
No.
Name
Signal logic
Hardware EI signal:
assigned to (EI1 to 8)
Communications EI signal:
assigned to (EI 9 to 24)
7
+OT
Normally closed contact
Normally open contact
8
-OT
Normally closed contact
Normally open contact
10
Forced stop [EMG]
Normally closed contact
Normally open contact
34
External regenerative resistor
overheat
Normally closed contact
Normally open contact







































































