




















Abbreviations used in this manual
The abbreviations used in this manual are explained in the table below.
Symbols used in this manual
danger to personnel from
electricity and its effects
general warning
general instructions
mechanical hazard
ð
p.
see page (cross-ref.)
l
special emphasis
Keys on the servo amplifier panel :
U
press once
: move up one menu item, increase number by one
press twice in rapid succession
: increase number by ten
U
press once
: move down one menu item, decrease number by one
press twice in rapid succession
: decrease number by ten
U
U
hold right key pressed, and then press left key as well
:
to enter number, “Return” function
Kürzel / Symbole
User manual PROFIBUS DP PMCtendo DD4
Page 7
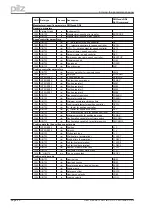
Kürzel / Symbole
Abbrev.
Meaning
AGND
Analog ground
AS
Restart Lock, option
BTB/RTO
Ready to operate
CAN
Fieldbus (CANopen)
CE
Communité Européenne (EC)
CLK
Clock signal
COM
Serial interface for a PC-AT
DGND
Digital ground
DIN
German Institute for industrial Standards
Disk
Magnetic storage (diskette, hard disk)
EEPROM
Electrically erasable programmable memory
EMC
Electromagnetic compatibility
EMI
Electromagnetic interference
EN
European standard
ESD
Electrostatic discharge
IEC
International Electrotechnical Commission
IGBT
Insulated Gate Bipolar Transistor
INC
Incremental Interface
ISO
International Standardization Organization
LED
Light-emitting diode
MB
Megabyte
MS-DOS
Operating system for PC-AT
Abbrev
Meaning
NI
Zero pulse
NSTOP
Limit-switch input for CCW rotation (left)
PC-AT
Personal computer with 80x86 Processor
PELV
Protected low voltage
PGND
Ground for the interface
PSTOP
Limit-switch input for CW rotation (right)
PWM
Pulse-width modulation
RAM
Volatile memory
Rregen
Regen resistor
RBext
External regen resistor
RBint
Internal regen resistor
RES
Resolver
ROD 426
A quad B encoder
PLC
Programmable logic controller
SRAM
Static RAM
SSI
Synchronous serial interface
SW/SETP.
setpoint
UL
Underwriters Laboratory
VAC
AC voltage
VDC
DC voltage
VDE
Verein deutscher Elektrotechniker
XGND
Ground for the 24V supply
Содержание Motion Control PMC
Страница 1: ...Motion Control PMC User manual Item No 21 522 02 Communication profile PROFIBUS DP for PMCtendo DD4 ...
Страница 8: ...This page is deliberately left blank Page 8 User manual PROFIBUS DP PMCtendo DD4 ...
Страница 10: ...This page is deliberately left blank Page 10 User manual PROFIBUS DP PMCtendo DD4 2 Important ...
Страница 14: ...This page is deliberately left blank Page 14 User manual PROFIBUS DP PMCtendo DD4 3 Installation Setup ...
Страница 44: ...This page is deliberately left blank Page 44 User manual PROFIBUS DP PMCtendo DD4 6 Process data channel ...
Страница 62: ...21 522 02 2005 10 Printed in Germany ...







































































