


















FB102 DRIVEFSS
Together with an instance data block the FB102 is used to transfer motion task data for the
PMCtendo DD4. The method is as follows:
Bit 15 of the select parameter WAHL determines if a sample motion task is transferred to the local
motion task no. 0. Inside this motion task individual motion parameters can be changed. After the
changes the complete motion task is transferred to motion task with the number FSNrZ in the drive. If
this transfer is not successful bit 15 of the parameter WAHL will be set. The bits of WAHL not set back
to 0 will show, which parameter could not be written.
Please note:
When FB102 is started (SEND = 1) the call of FC110 must be skipped in the program
sequence, since FC110 is used by FB102. FC110 must not be used to read or write parameters,
before the SEND bit of FB102 is set back.
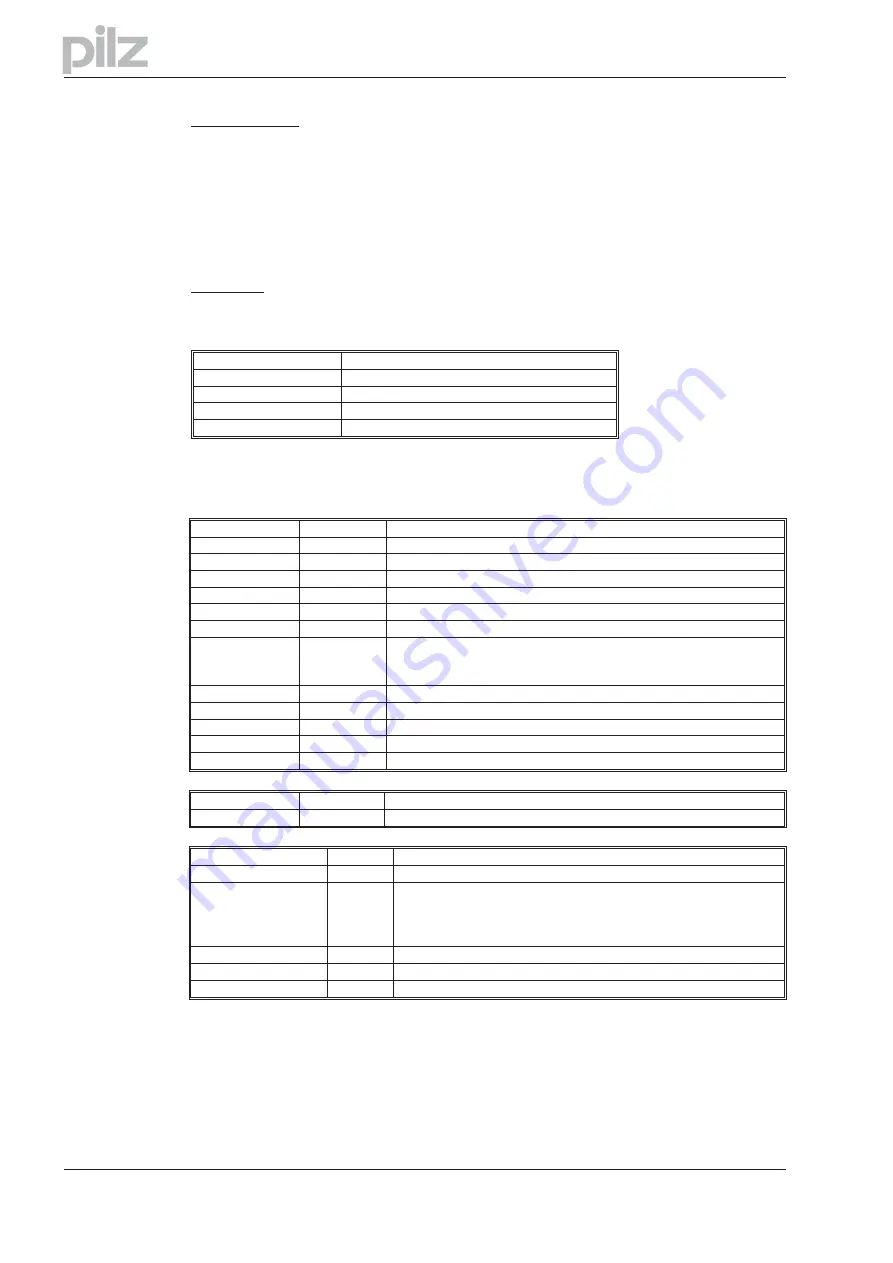
Technical Data:
Name:
DRIVEFS
Flags used:
MW200-MW254
Access to:
DB User Data, Instance Data Block
Function of the Parameters of FB102
Inputs:
POSI
dword
position for motion task, Bit0 in WAHL
VSOL
dword
speed for motion task, Bit1 in WAHL
FART
word
type of motion task, Bit2 in WAHL
RACC
word
acceleration ramp, Bit3 in WAHL
RDEC
word
deceleration ramp, Bit4 in WAHL
RACC2
word
jerk limitation for acceleration, Bit5 in WAHL
RDEC2
word
jerk limitation for deceleration, Bit6 in WAHL. Since firmware version 2.00
times are discretionary. If different from 0 the drive will follow a sin
2
ramp
(s-curve), if the configuration allows it.
TDEL
word
delay time for the next motion task, Bit7 in WAHL
FFOL
byte
number of the next motion task, Bit8 in WAHL
FSNrQ
byte
number of the source motion task; is used, when Bit15 of WAHL = 1
FSNrZ
byte
number of target motion task
SEND
bool
start transmission
Outputs:
AKTI
bool
FB 102 is running
Static Parameters:
STFB
word
Statusdisplay for this function block
WAHL
word
binary word to select parameters to be written; for interpretation see
above; Bit 15 selects if a motion task is completely overwritten by the di-
rect motion task ( = 0 ) or changed ( = 1); choice is done by setting the
corresponding bit.
STAT
word
Status for all function blocks, same as FC100 STAT
REDY
bool
writing motion block finished
FAUL
bool
error occured, error position -> change of bits in WAHL
Page 58
User manual PROFIBUS DP PMCtendo DD4
9 Appendix
Содержание Motion Control PMC
Страница 1: ...Motion Control PMC User manual Item No 21 522 02 Communication profile PROFIBUS DP for PMCtendo DD4 ...
Страница 8: ...This page is deliberately left blank Page 8 User manual PROFIBUS DP PMCtendo DD4 ...
Страница 10: ...This page is deliberately left blank Page 10 User manual PROFIBUS DP PMCtendo DD4 2 Important ...
Страница 14: ...This page is deliberately left blank Page 14 User manual PROFIBUS DP PMCtendo DD4 3 Installation Setup ...
Страница 44: ...This page is deliberately left blank Page 44 User manual PROFIBUS DP PMCtendo DD4 6 Process data channel ...
Страница 62: ...21 522 02 2005 10 Printed in Germany ...







































































