














58
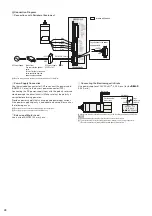
As illustrated below, the parameters listed below are required
when selecting an actuator for transporting a load from A to B.
B
A
Guide
Load
The required parameters are as follows:
●
Mass of load (
m
) or thrust force (
F
)
●
Positioning distance (
L
)
●
Positioning time (
T
)
Among the parameters above, the thrust force and positioning
time can be calculated using the equations below.
■
Calculate the Thrust Force
①
Calculate the thrust force required when accelerating the load.
F
a
=
m
a
+
g
(
sin
θ
+
μ
·
cos
θ
)
②
Calculate the thrust force that allows for pushing and pulling.
F
=
F
max
−
F
a
If the external force of the load is smaller than
F
, push and pull
are possible.
F
max
: Max. thrust force of the actuator [N]
F
a
: Required thrust force during acceleration/deceleration operation [N]
F
: Thrust force that allows for pushing or pulling of external force [N]
m
: Load mass [kg]
a
: Acceleration [m/s
2
]
g
: Gravitational acceleration
9.807
[m/s
2
]
μ
: Friction coefficient of the guide supporting the load
0.01
θ
: Angle formed by the traveling direction and the horizontal plane [˚]
θ
External force
■
Calculate the Positioning Time
Check whether the actuator can perform the necessary
positioning within the specified time. This can be done by
obtaining a rough positioning time from the graph or by obtaining
an accurate positioning time by calculation. The respective
check procedures are explained below.
The actual operating time is subject to a small margin of error, so
use the calculation only as a reference.
●
Obtaining from a Graph
Example) Check the positioning time when you provisionally
select the
DRL42G-04A2P-KD
and drive a transport mass of 5
kg vertically a traveling amount of 40 mm. Check that the required
specifications are within the product's specification values.
Check the graph of
DRL42
positioning distance — positioning
time.
1.0
0
0.5
1.5
2.0
2.5
3.5
3.0
4.0
0
40
30
50
60
90
70
80
100
10
20
Positioning Distance
[mm]
Positioning Time
[s
]
Standard Motor, Lead
2 mm
Based on the above graph, it can be verified that the load can be
positioned over 40 mm within 1.5 seconds.
●
Obtaining by Calculations
①
Check the operating conditions.
Check the following conditions:
Installation direction, load mass, positioning distance, starting
speed, acceleration, operating speed
②
From the above operating conditions, check whether the drive
pattern is the triangular drive or trapezoidal drive.
For the triangular drive, calculate the max. speed from the
positioning distance, starting speed, acceleration and operating
speed. If the calculated max. speed is below the operating
speed, the drive pattern will be a triangular drive. If the calculated
max. speed exceeds the operating speed, the drive pattern will
be a trapezoidal drive.
a
1
+
a
2
2
·
a
1
·
a
2
·
L
=
V
R
max
V
R
max
V
R
max
=
·
10
3
+
Vs
2
>
V
R
→
Triangular Drive
V
R
→
Trapezoidal Drive
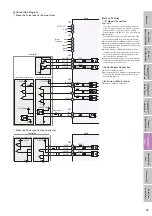
③
Calculate the positioning time.
<Trapezoidal Drive>
=
T
1
+
T
2
+
T
3
=
+
T
V
R
−
V
S
a
1
×
10
3
V
R
−
V
S
a
2
×
10
3
2
×
a
1
×
a
2
×
V
R
×
10
3
+
−
L
V
R
(
a
1
+
a
2
)
×
(
V
R
2
−
V
S
2
)
<Triangular Drive>
=
T
1
+
T
2
+
T
V
Rmax
−
V
S
V
Rmax
−
V
S
a
1
×
10
3
a
2
×
10
3
=
a
1
a
2
T
T
T
3
T
2
T
2
T
1
T
1
a
1
a
2
V
S
V
Rmax
V
S
V
R
<Pattern 1>
<Pattern 2>
Speed
Time
Speed
Time
Trapezoidal
Drive
Triangular
Drive
V
Rmax
: Calculated max. speed of triangular drive [mm/s]
V
R
: Operating speed [mm/s]
V
s
: Starting speed [mm/s]
T
: Positioning time [s]
L
: Positioning distance [mm]
T
1
: Acceleration time [s]
a
1
: Acceleration [m/s
2
]
T
2
: Deceleration time [s]
a
2
: Deceleration [m/s
2
]
T
3
: Constant speed time [s]
Selection Calculation







































































