





























Using the URCap Plugin
43
OnRobot © 2018
www.onrobot.com
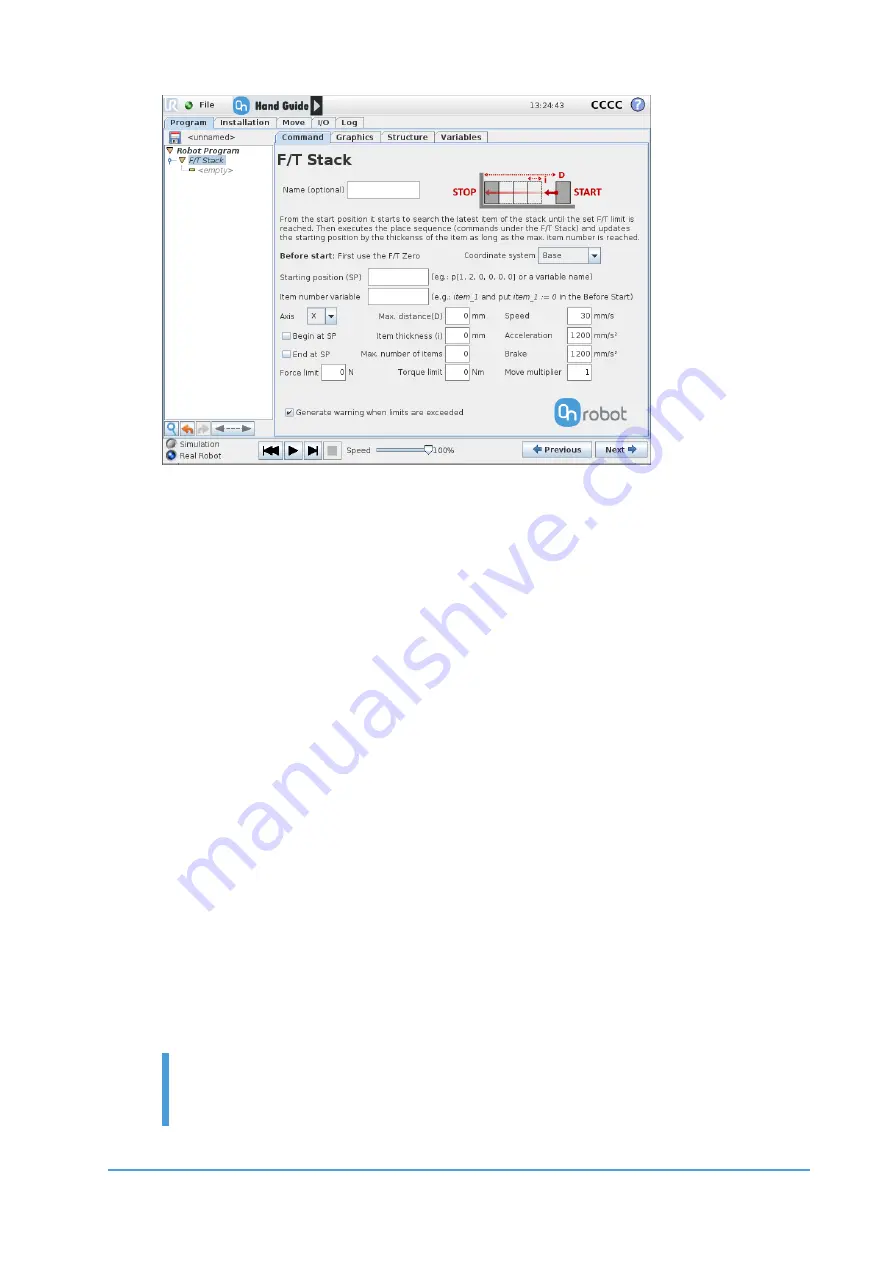
Coordinate system:
The coordinate system used both for the movement and for
the sensor reading. It can be set to
Base
or
Tool
(according to the UR’s reference
frames).
Starting position (SP):
The starting pose can be defined by a constant such as
p[1,2,3,4,5,6]
or by a variable. It needs to be higher than the full stack’s top.
Item number variable:
The variable that is used to track how many items are
stacked successfully. Enter here the variable name that you have previously
defined and set to 0. (E.g.: Use the built-in UR Assignment command
item_1 := 0
in the Before Start section of your program).
Axis:
The axis along the stacking is performed (X,Y or Z).
Max. distance (D):
The stopping distance along the defined axis. It is measured
from the Starting position (SP) and needs to be more than the size of the full stack.
The sign defines which direction the stacking is performed along the given axis.
Item thickness (i):
The stacked items thickness.
Max. number of items:
Defines how many items could be stacked, so how many
stacked item makes the stack full.
Force limit (N):
The force limit for the collision detection to find the stack top.
Torque limit (Nm):
The torque limit for the collision detection to find the stack
top.
Speed:
The movement speed while searching for the stack top. (m/s, rad/s)
The slower the speed during the searching phase is the better to
work with hard contacts (such as metal surfaces) to avoid
overshoots due to the robot’s and the tool's momentum.







































































