





























Operation
76
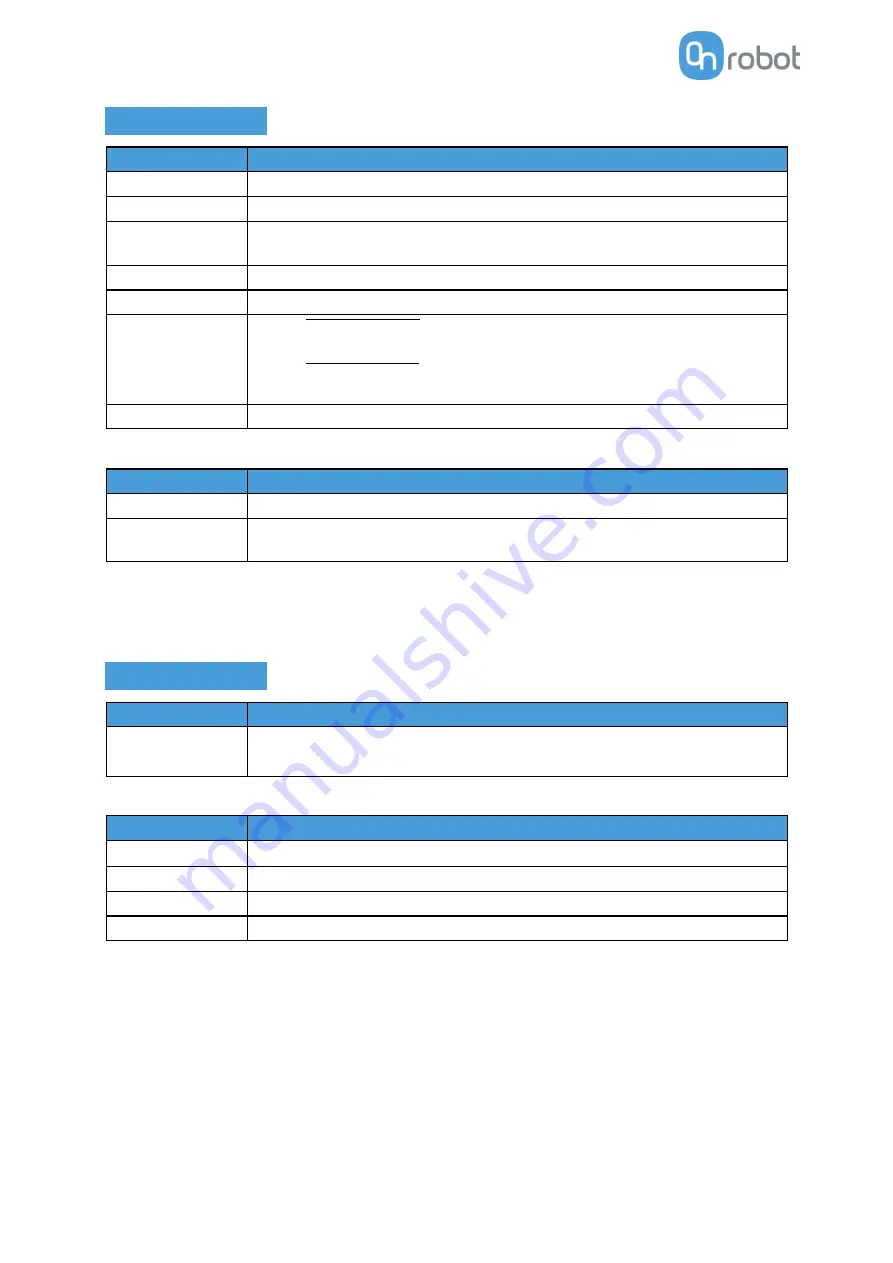
RG2-FT
Conditions
Description
Proximity (L,R)
Actual values of the left and right fingertip proximity sensors [mm]
Width
Actual width of the gripper [mm]
Busy
True if the gripper is in motion (can only accept new commands when not
busy)
Grip
Internal or external grip is detected.
FT Bias
TRUE
if the sensor has been zeroed (biased).
Left and Right
F3D,T3D
F3D
= √𝐹𝑥
2
+ 𝐹𝑦
2
+𝐹𝑧
2
[N] where Fx, Fy, Fz are the fingertip sensor force
components
T3D
= √𝑇𝑥
2
+ 𝑇𝑦
2
+𝑇𝑧
2
[Nm] where Tx, Ty, Tz are the fingertip sensor torque
components
Both F3D,T3D
The combined F3D and T3D acting on an object that the gripper gripped on
Commands
Description
Width
Set the gripper to a new width [mm] with a gripping force [N]
Bias
Set to
TRUE
to zero the F/T sensor signals (not permanent, will revert on
power reset)
VG10 / VGC10
Conditions
Description
Actual vacuum A
Actual vacuum B
Actual vacuum level [0-80%] for channel A and channel B
Commands
Description
Current limit
Set the current limit (0-1000mA), default is 500mA
Grip
Sets the vacuum level (0-80%) for channel A (param1) and channel B (param2)
Idle
Switch of the motor but keep the valve closed for channel A, B or A+B
Release
Opens the valve to quickly release the vacuum for channel A, B or A+B
Содержание Gecko Gripper
Страница 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Страница 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Страница 26: ...Installation 26...
Страница 47: ...Operation 47...
Страница 48: ...Operation 48 Mode II OnRobot WebLogic...
Страница 64: ...Installation 64...
Страница 106: ...Additional Software Options 106 HEX E H QC RG2 6 T Oassemblyid 150 T Odata size 40 bytes T Oparameters...
Страница 113: ...Additional Software Options 113 RG2 6 VG10 VGC10 T Oassemblyid 156 T Odata size 64 bytes T Oparameters...
Страница 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Страница 117: ...Additional Software Options 117 RG2 6 Gecko T Oassemblyid 158 T Odata size 64 bytes T Oparameters...
Страница 123: ...Additional Software Options 123...
Страница 135: ...Hardware Specification 135 RG2 FT GrippingSpeedGraph GripperWorkingRange The dimensionsare in millimeters...
Страница 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Страница 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Страница 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Страница 163: ...Hardware Specification 163 Adapter I...
Страница 164: ...Hardware Specification 164 Adapter J...
Страница 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Страница 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Страница 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Страница 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Страница 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Страница 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Страница 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Страница 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Страница 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Страница 185: ...Certifications 185 12 Certifications...
Страница 186: ...Certifications 186...
Страница 187: ...Certifications 187...
Страница 188: ...Certifications 188...
Страница 189: ...Certifications 189...
Страница 190: ...Certifications 190...