





























Operation
38
HEX-E/H QC
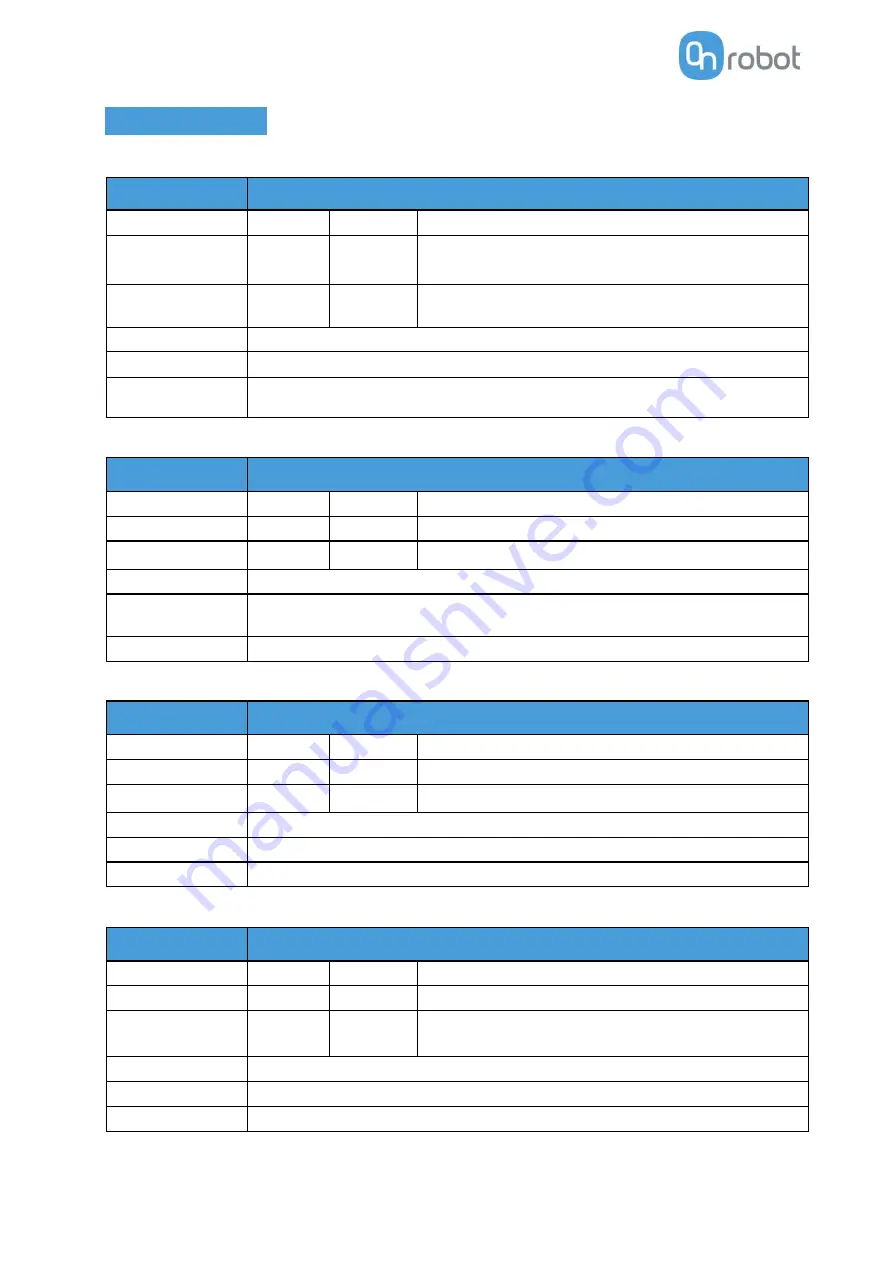
Function name:
OR_HEX_get(FT_type)
Name
Type
Description
Input:
FT_type
string
Requested force/torque value. Valid inputs:
“Fx”, “Fy”, “Fz”, “Tx”, “Ty”, “Tz”
Output:
-
integer
Requested force/torque value. Forces are in 1/10N,
torques are in 1/100Nm
Description:
Get current force/torque value form the HEX sensor.
Example:
FT_type = “Fx”
CallProc Fx_value = OR_HEX_get(FT_type)
Function name:
OR_HEX_zero()
Name
Type
Description
Input:
-
-
-
Output:
-
-
-
Description:
Zeroing HEX sensor. (Use current force/torque values as offset, these values will
be zero.)
Example:
CallProc OR_HEX_zero()
Function name:
OR_HEX_unzero()
Name
Type
Description
Input:
-
-
-
Output:
-
-
-
Description:
Unzero HEX sensor. (Reset offset.)
Example:
CallProc OR_HEX_unzero()
Function name:
OR_HEX_isConn()
Input:
Name
Type
Description
-
-
-
Output:
-
integer
0: sensor is not connected
1: sensor is connected
Description:
Checks that is HEX connected or not.
Example:
CallProc OR_HEX_isConn()
Содержание Gecko Gripper
Страница 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Страница 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Страница 26: ...Installation 26...
Страница 47: ...Operation 47...
Страница 48: ...Operation 48 Mode II OnRobot WebLogic...
Страница 64: ...Installation 64...
Страница 106: ...Additional Software Options 106 HEX E H QC RG2 6 T Oassemblyid 150 T Odata size 40 bytes T Oparameters...
Страница 113: ...Additional Software Options 113 RG2 6 VG10 VGC10 T Oassemblyid 156 T Odata size 64 bytes T Oparameters...
Страница 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Страница 117: ...Additional Software Options 117 RG2 6 Gecko T Oassemblyid 158 T Odata size 64 bytes T Oparameters...
Страница 123: ...Additional Software Options 123...
Страница 135: ...Hardware Specification 135 RG2 FT GrippingSpeedGraph GripperWorkingRange The dimensionsare in millimeters...
Страница 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Страница 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Страница 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Страница 163: ...Hardware Specification 163 Adapter I...
Страница 164: ...Hardware Specification 164 Adapter J...
Страница 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Страница 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Страница 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Страница 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Страница 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Страница 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Страница 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Страница 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Страница 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Страница 185: ...Certifications 185 12 Certifications...
Страница 186: ...Certifications 186...
Страница 187: ...Certifications 187...
Страница 188: ...Certifications 188...
Страница 189: ...Certifications 189...
Страница 190: ...Certifications 190...