





























RC40 Control manual
12
2 Introduction of controller
2.1 Introduction
NAU-rc4 controller is an independently developed SCARA robot controller. The software
adopts advanced real-time system and bus control. The whole control system has high real-
time performance.Robot programming language is made through a lot of application
experience, making the application more simple.
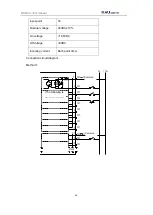
2.2 The name and functions of each part of the controller
(1) POWER indicator
The power indicator lights up green when the system is on
(2) READY indicator
When the system starts successfully, the ready indicator lights up in yellow
(3) ERROR indicator
When an error occurs in the system, the error indicator will be bright red
(4) External encoder interface:
Reserve external encoder interface
(5) COM3 Driver Debugging Port: