




















Troubleshooting guide (en) 07/2020 - v.1.1 ©Copyright 2019-2020: Mobile Industrial Robots A/S.
50
MiR Hook 100/MiR Hook 200
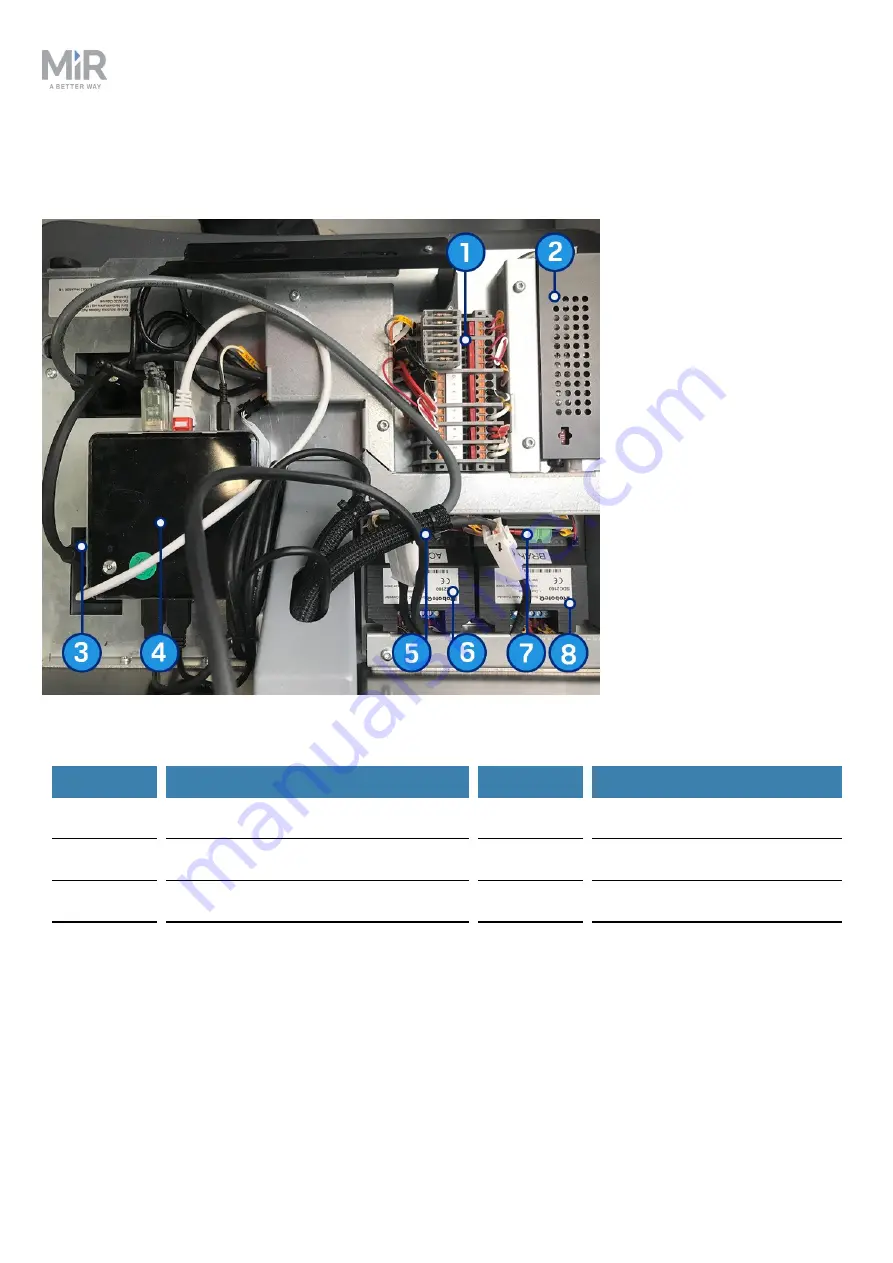
Figure 1.5. MiR Hook 100/MiR Hook 200 internal components
Label no.
Description
Label no.
Description
1
Fuse box
2
DC/DC-USB
3
Top application power interface
4
Hook computer
5
Encoder connections
6
Activator motor controller
7
Encoder connections
8
Brake motor controller



































































