




























WWW.NNC.IR
3 - 38
3. SIGNALS AND WIRING
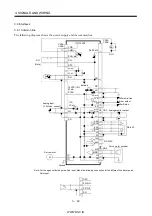
3.4.6 Torque/position control change mode
Set "0005" in parameter No. 0 to switch to the torque/position control change mode.
(1) Control change (LOP)
Use control change (LOP) to switch between the torque control mode and the position control mode
from an external contact. Relationships between LOP and control modes are indicated below.
(Note) LOP
Servo control mode
0
Torque control mode
1
Position control mode
Note. 0: off
1: on
The control mode may be changed in the zero speed status.
To ensure safety, change control after the servo motor has stopped. When position control mode is
changed to torque control mode, droop pulses are reset.
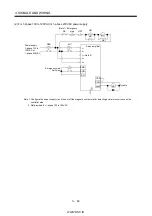
If the signal has been switched on-off at the speed higher than the zero speed and the speed is then
reduced to the zero speed or less, the control mode cannot be changed. A change timing chart is shown
below.
0V
10V
ON
OFF
ON
OFF
Servo motor speed
Zero speed (ZSP)
Control change (LOP)
Zero speed
level
Analog torque
command (TLA)
Speed
control mode
Torque
control mode
Speed
control mode
(2) Speed limit in torque control mode
As in section 3.4.3 (3).
(3) Torque control in torque control mode
As in section 3.4.3 (1).
(4) Torque limit in torque control mode
As in section 3.4.3 (2).
(5) Torque limit in position control mode
As in section 3.4.1 (5).
Содержание MR-J2S-*A
Страница 13: ...WWW NNC IR A 12 MEMO ...
Страница 117: ...WWW NNC IR 3 70 3 SIGNALS AND WIRING MEMO ...
Страница 185: ...WWW NNC IR 7 12 7 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 195: ...WWW NNC IR 8 10 8 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 197: ...WWW NNC IR 9 2 9 INSPECTION MEMO ...
Страница 221: ...WWW NNC IR 11 10 11 OUTLINE DIMENSION DRAWINGS MEMO ...
Страница 293: ...WWW NNC IR 13 64 13 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...
Страница 321: ...WWW NNC IR 14 28 14 COMMUNICATION FUNCTIONS MEMO ...
Страница 389: ...WWW NNC IR 15 68 15 ABSOLUTE POSITION DETECTION SYSTEM MEMO ...






































































