




























WWW.NNC.IR
3 - 59
3. SIGNALS AND WIRING
(d) Both main and control circuit power supplies off
Servo motor speed
ON
OFF
Base circuit
Electromagnetic
brake interlock (MBR)
Trouble (ALM)
No (ON)
Yes (OFF)
ON
OFF
Main circuit
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Control circuit
power
(Note 1)
15 to 60ms
(10ms)
(10ms or less)
(Note 2) ON
OFF
Electromagnetic brake
operation delay time
Note 1. Changes with the operating status.
2. ON: Electromagnetic brake is not activated.
OFF: Electromagnetic brake is activated.
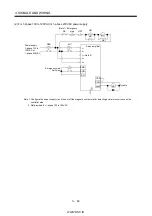
(e) Only main circuit power supply off (control circuit power supply remains on)
Servo motor speed
ON
OFF
Base circuit
Electromagnetic
brake interlock (MBR)
Trouble (ALM)
No (ON)
Yes (OFF)
ON
OFF
Main circuit power
supply
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
(Note 1)
15ms or more
Electromagnetic brake
operation delay time
(Note 2)
(10ms)
(Note 3) ON
OFF
Note 1. Changes with the operating status.
2. When the main circuit power supply is off in a motor stop status, the main circuit off warning (AL.E9) occurs and the
trouble (ALM) does not turn off.
3. ON: Electromagnetic brake is not activated.
OFF: Electromagnetic brake is activated.
Содержание MR-J2S-*A
Страница 13: ...WWW NNC IR A 12 MEMO ...
Страница 117: ...WWW NNC IR 3 70 3 SIGNALS AND WIRING MEMO ...
Страница 185: ...WWW NNC IR 7 12 7 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 195: ...WWW NNC IR 8 10 8 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 197: ...WWW NNC IR 9 2 9 INSPECTION MEMO ...
Страница 221: ...WWW NNC IR 11 10 11 OUTLINE DIMENSION DRAWINGS MEMO ...
Страница 293: ...WWW NNC IR 13 64 13 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...
Страница 321: ...WWW NNC IR 14 28 14 COMMUNICATION FUNCTIONS MEMO ...
Страница 389: ...WWW NNC IR 15 68 15 ABSOLUTE POSITION DETECTION SYSTEM MEMO ...







































































