





























WWW.NNC.IR
10 - 9
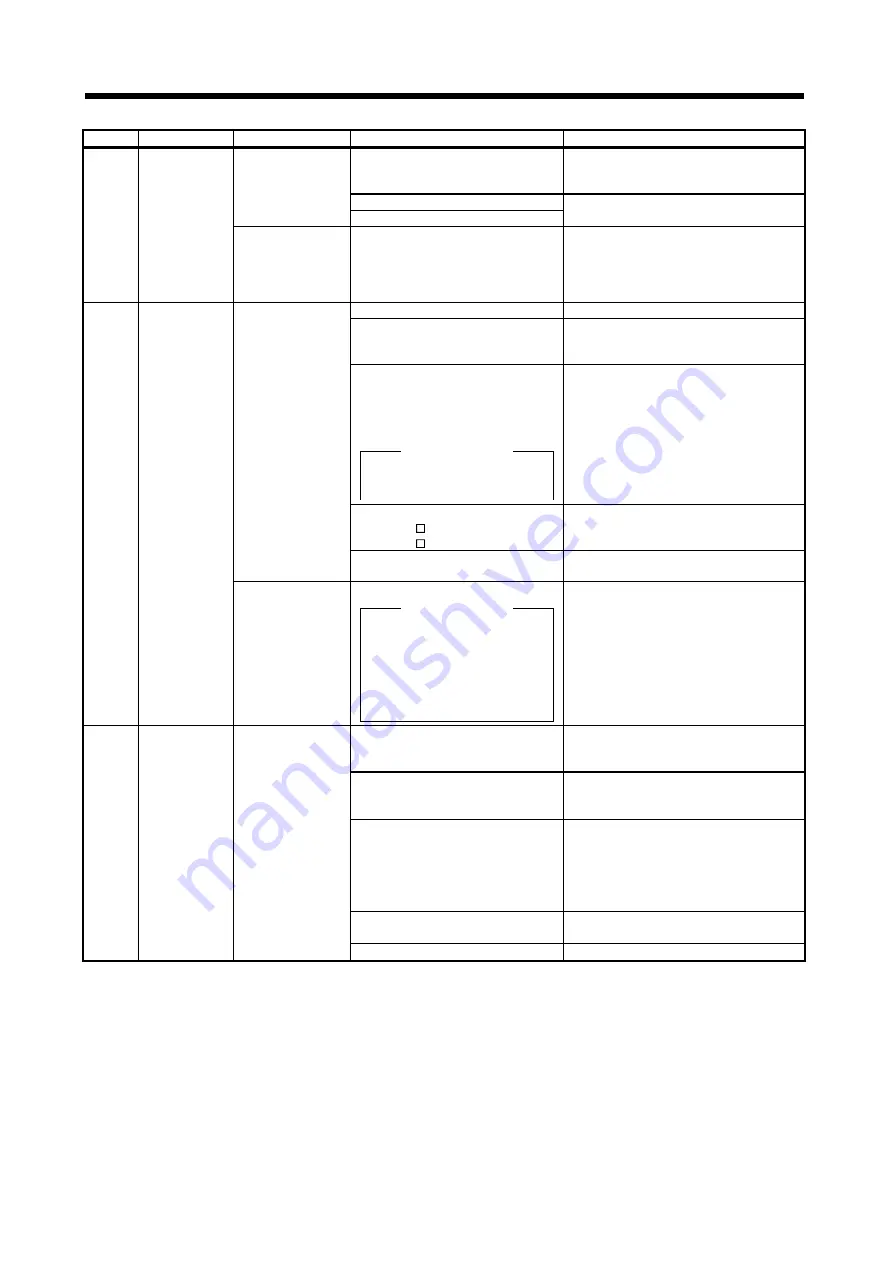
10. TROUBLESHOOTING
Display
Name
Definition
Cause
Action
1. Reduced voltage of super capacitor
in encoder
After leaving the alarm occurring for a few
minutes, switch power off, then on again.
Always make home position setting again.
2. Battery voltage low
Absolute position
data in error
3. Battery cable or battery is faulty.
Change the battery.
Always make home position setting again.
AL.25
Absolute
position erase
Power was switched
on for the first time
in the absolute
position detection
system.
4. Super capacitor of the absolute
position encoder is not charged
After leaving the alarm occurring for a few
minutes, switch power off, then on again.
Always make home position setting again.
1. Wrong setting of parameter No. 0 Set correctly.
2. Built-in regenerative resistor or
regenerative option is not
connected.
Connect correctly
3. High-duty operation or continuous
regenerative operation caused the
permissible regenerative power of
the regenerative option to be
exceeded.
Checking method
Call the status display and check
the regenerative load ratio.
1. Reduce the frequency of positioning.
2. Use the regenerative option of larger
capacity.
3. Reduce the load.
4. Power supply voltage is abnormal.
MR-J2S- A:260VAC or more
MR-J2S- A1:135VAC or more
Check the power supply
Permissible
regenerative power
of the built-in
regenerative
resistor or
regenerative option
is exceeded.
5. Built-in regenerative resistor or
regenerative option faulty.
Change the servo amplifier or
regenerative option.
AL.30
Regenerative
error
Regenerative
transistor fault
6. Regenerative transistor faulty.
Checking method
1) The regenerative option has
overheated abnormally.
2) The alarm occurs even after
removal of the built-in
regenerative resistor or
regenerative option.
Change the servo amplifier.
1. Input command pulse frequency
exceeded the permissible
instantaneous speed frequency.
Set command pulses correctly.
2. Small acceleration/deceleration
time constant caused overshoot to
be large.
Increase acceleration/deceleration time
constant.
3. Servo system is instable to cause
overshoot.
1. Re-set servo gain to proper value.
2. If servo gain cannot be set to proper
value.
1) Reduce load inertia moment ratio; or
2) Reexamine acceleration/
deceleration time constant.
4. Electronic gear ratio is large
(parameters No. 3, 4)
Set correctly.
AL.31
Overspeed
Speed has exceeded
the instantaneous
permissible speed.
5. Encoder faulty.
Change the servo motor.
Содержание MR-J2S-*A
Страница 13: ...WWW NNC IR A 12 MEMO ...
Страница 117: ...WWW NNC IR 3 70 3 SIGNALS AND WIRING MEMO ...
Страница 185: ...WWW NNC IR 7 12 7 GENERAL GAIN ADJUSTMENT MEMO ...
Страница 195: ...WWW NNC IR 8 10 8 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Страница 197: ...WWW NNC IR 9 2 9 INSPECTION MEMO ...
Страница 221: ...WWW NNC IR 11 10 11 OUTLINE DIMENSION DRAWINGS MEMO ...
Страница 293: ...WWW NNC IR 13 64 13 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...
Страница 321: ...WWW NNC IR 14 28 14 COMMUNICATION FUNCTIONS MEMO ...
Страница 389: ...WWW NNC IR 15 68 15 ABSOLUTE POSITION DETECTION SYSTEM MEMO ...







































































