



























DS80C400 Network Microcontroller
83 of 96
Error Counter Interrupt Generation
The CAN module can be configured to alert the microcontroller when either 96 or 128 errors have been detected by
the transmit or receive error counters. The error-count select bit, ERCS (C0C.1), selects whether the limit is 96
(ERCS = 0) or 128 (ERCS = 1) errors. When the error limit is exceeded, the CAN error-count exceeded bit CECE
(C0S.6) is set. If the ERIE, C0IE, and EA SFR bits are configured, an interrupt is generated. If the ERCS bit is set,
the device generates an interrupt when the CECE bit is set or cleared, if the interrupt is enabled.
Bit Timing
Bit timing of the CAN transmission can be adjusted per the CAN 2.0B specification. The CAN 0 bus timing register
zero (C0BT0), located in the control/status/mask register block in MOVX memory, controls the PHASE_SEG1 and
PHASE_SEG2 time segments and the baud rate prescaler (BPR5–BPR0). The CAN 0 bus timing register one
(C0BT1) contains the controls for the sampling rate and the number of clock cycles assigned to the Phase
Segment 1 and 2 portions of the nominal bit time. The values of both of the bus timing registers are automatically
loaded into the CAN controller following each software change of the SWINT bit from a 1 to a 0 by the
microcontroller. The bit timing parameters must be set before starting operation of the CAN controller. These
registers are modifiable only during a software initialization, (SWINT = 1), when the CAN controller is
not
in a bus-
off mode, and after the removal of a system reset or a CAN reset. To avoid unpredictable behavior of the CAN
controller, the software cannot clear the SWINT bit when TSEG1 and TSEG2 are both cleared to 0.
1-Wire Bus Master
The DS80C400 incorporates a 1-Wire bus master to support communication to external 1-Wire devices. The bus
master provides complete control of the 1-Wire bus and coordinates transmit (Tx)/receive (Rx) activities with
minimal supervision by the CPU. All timing and control sequences for the bus are generated within the bus master.
Communication between the CPU and the bus master is accomplished through read/write access of the 1-Wire
master address (OWMAD; EEh) and 1-Wire master data (OWMDR; EFh) SFRs. When 1-Wire bus activity
generates a condition that requires servicing by the CPU, the bus master sets the appropriate status bit to create
an interrupt request to the CPU. If the 1-Wire bus master interrupt source has been enabled, the CPU services the
request according to the priority that has been assigned. The 1-Wire bus master supports bit banging, search ROM
accelerator, and overdrive modes. Detailed operation of the 1-Wire bus is described in
The Book of iButton
Standards
(
www.maxim-ic.com/iButtonBook
).
Communicating with the Bus Master
The microcontroller interface to the 1-Wire bus master is through two SFRs, 1-Wire master address (OWMAD;
EEh), and 1-Wire master data (OWMDR; EFh). These two registers allow read/write access of the six internal
registers of the 1-Wire bus master. The internal registers provide a means for the CPU to configure and control
transmit/receive activity through the bus master.
The three least significant bits (A2:A0) of the OWMAD SFR specify the address of the internal register to be
accessed. The OWMDR SFR is used for read/write access to the implemented bits of the specified internal
register. All internal registers are read/write accessible except the interrupt flag register (xxxxx010b), which allows
only read access to interrupt status flags. It should also be noted that all writes to the Tx/Rx buffer register
(xxxxx001b) are directed to the Tx buffer and all reads retrieve data from the Rx buffer. The 1-Wire bus master
internal register map is shown in
Table 22
.
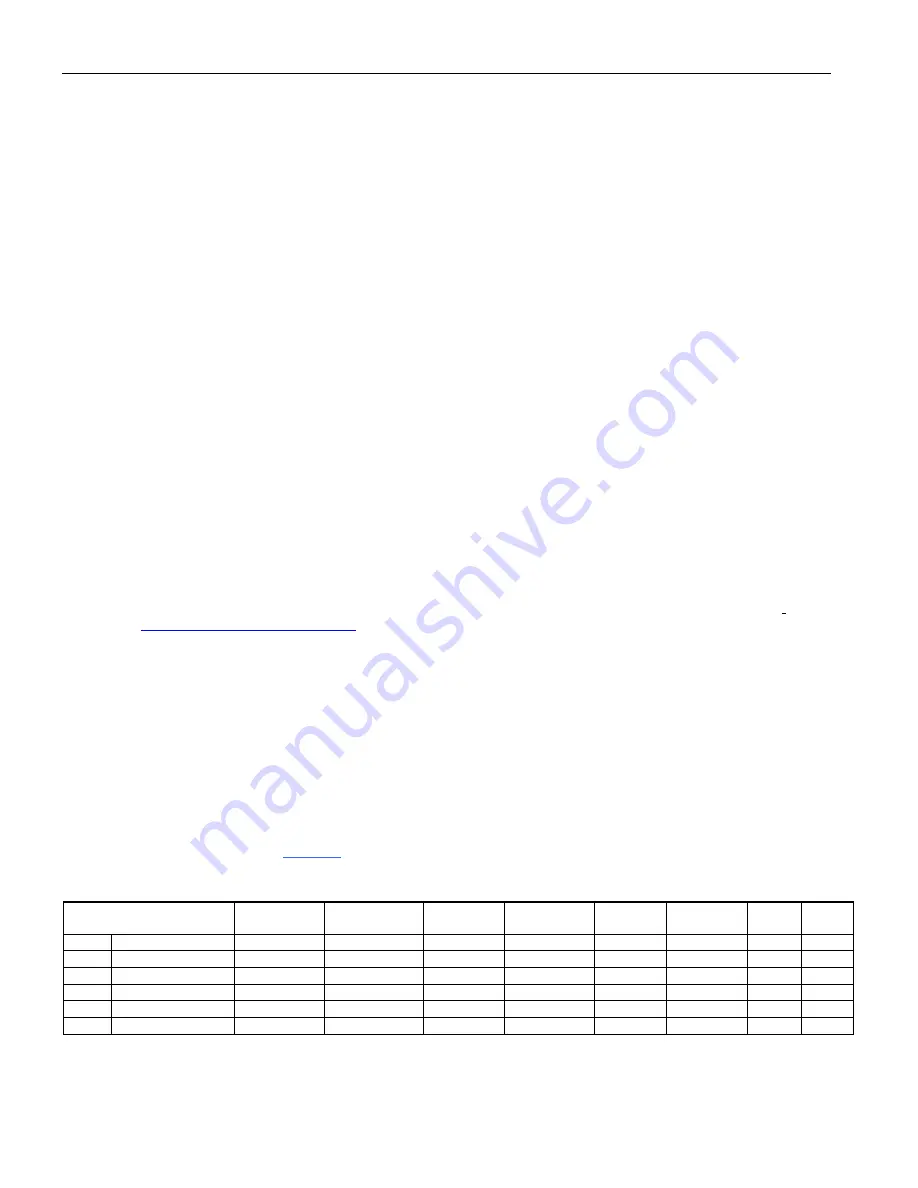
Table 22. 1-Wire Bus Master Internal Register Map
REGISTER ADDRESS
*
/
FUNCTION
BIT 7
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
BIT 0
000 Command
—
—
—
— OW_IN FOW SRA
1WR
001 Tx/Rx
Buffer
D7
D6
D5
D4
D3
D2 D1 D0
010 Interrupt
Flag OW_LOW
OW_SHORT RSRF
RBF
TEMT TBE PDR PD
011 Interrupt
Enable EOWL
EOWSH
ERSF
ERBF
ETMT ETBE
— EPD
100 Clock
Divisor CLK_EN
—
—
DIV2
DIV1 DIV0 PRE1
PRE0
101
Control
EOWMI
OD
BIT_CTL STP_SPLY STPEN EN_FOW PPM LLM
*Logic states represented by A2:A0 other than those listed in the table are considered to be invalid addresses and are not supported by the bus
master. When OWMAD contains an invalid address, reads of OWMDR return invalid data, and writes to OWMDR do not change the internal
register contents
.
Содержание DS80C400
Страница 6: ...DS80C400 Network Microcontroller 6 of 96...
Страница 7: ...DS80C400 Network Microcontroller 7 of 96...
Страница 15: ...DS80C400 Network Microcontroller 15 of 96...
Страница 16: ...DS80C400 Network Microcontroller 16 of 96 l...
Страница 22: ...DS80C400 Network Microcontroller 22 of 96 OW PIN TIMING...