





























Instruction Manual MC6000
8-8
Using setup mode (Setup mode)
Setup mode is used for setting up the speed control circuit, taking into account the moment of
inertia of the installation. The motor must therefore be connected to the installation.
Setup mode cannot be used in conjunction with the SCOPE function of MCWORK.
Safety waring:
Remember that the connected motor will rotate in setup mode. You as user are responsible for
ensuring safety.
1. Select MODE = 4 (_KPAD)
2. Enable speed control CFCON = SCON (_CONF) (otherwise the error message E-PAR will
be displayed with the error location number 118)
3. Switch off ramps: set parameters ACCR and DECR =0 (_REF)
4. Activate setup mode with SETUP = ON (_CONF)
5. Re-initialize (which returns to the main
MENU)
6. Operate the speed control with reference value 0 rpm (e.g. using the CTRL menu) then
apply a positive or negative step of approximately 50 to 100 rpm. When the motor reaches
the reference speed the control can be switched off again.
7. The values of the speed step response of the system (Servocontroller and link) can be
read in _SCON of the PARA-Menu:
•
STIME
Setup Time
Rise time
•
1OVER
First Overshoot
First overshoot
•
10PC
Ten Percent
Number of overshoots until the amplitude has reduced
to less than 10% of the first overshoot
The values of the rise time and the first overshoot are only valid if the torque limitation of the
motor was not reached (otherwise control behaves in non-linear fashion). If the limit case
occurs because too high a reference value step has been set STIME and 1OVER will be
preceded by a negative prefix. In this case the step response must be obtained again with
a step to a lower speed.
8. Optimizing the step response by matching SCGFA (_SCON).
In most applications a step response is required which has the minimum first overshoot.
After the first or, at the very latest, the second overshoot, the overshoot distances should be
less than 10 % of the first overshoot (Parameter 10PC < 1).
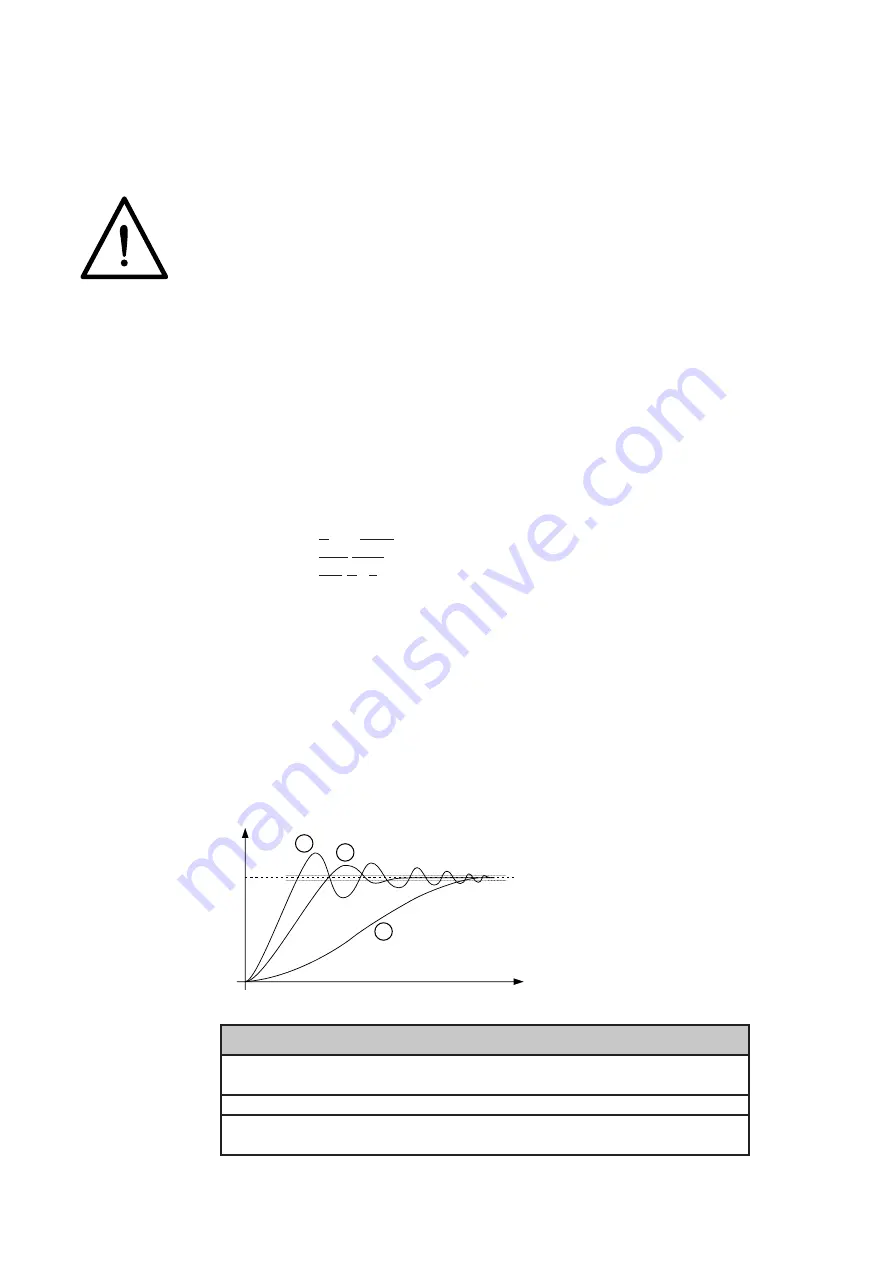
In general it is true to say that the
rise time is shorter when SCGFA is
increased (and vice versa) but this
can also render the control loop
unstable.
Main Sequences:
1
slow increase to final speed without overshoot
(aperiodic sequence)
2
very short rise time but strong overshoot
3
short rise time with minimum overshoot
(usually preferable)
n(t)
t
1
2
3
Содержание MASTERCONTROL MC6000 Series
Страница 10: ...MC6000 Instruction Manual 1 2 1 3 Manufacturer s Declaration for Servocontrollers ...
Страница 11: ...MC6000 Instruction Manual 1 3 ...
Страница 12: ...MC6000 Instruction Manual 1 4 1 4 Manufacturer s Declaration for Servomotors ...
Страница 13: ...MC6000 Instruction Manual 1 5 ...
Страница 15: ...MC6000 Instruction Manual 1 7 Copy of Summary ofTest Results as an example for MC6404 and MC6408 ...





















































