
















58
M2 ー 6
x4
M2 ー 6
x4
M2 ー 6
x2
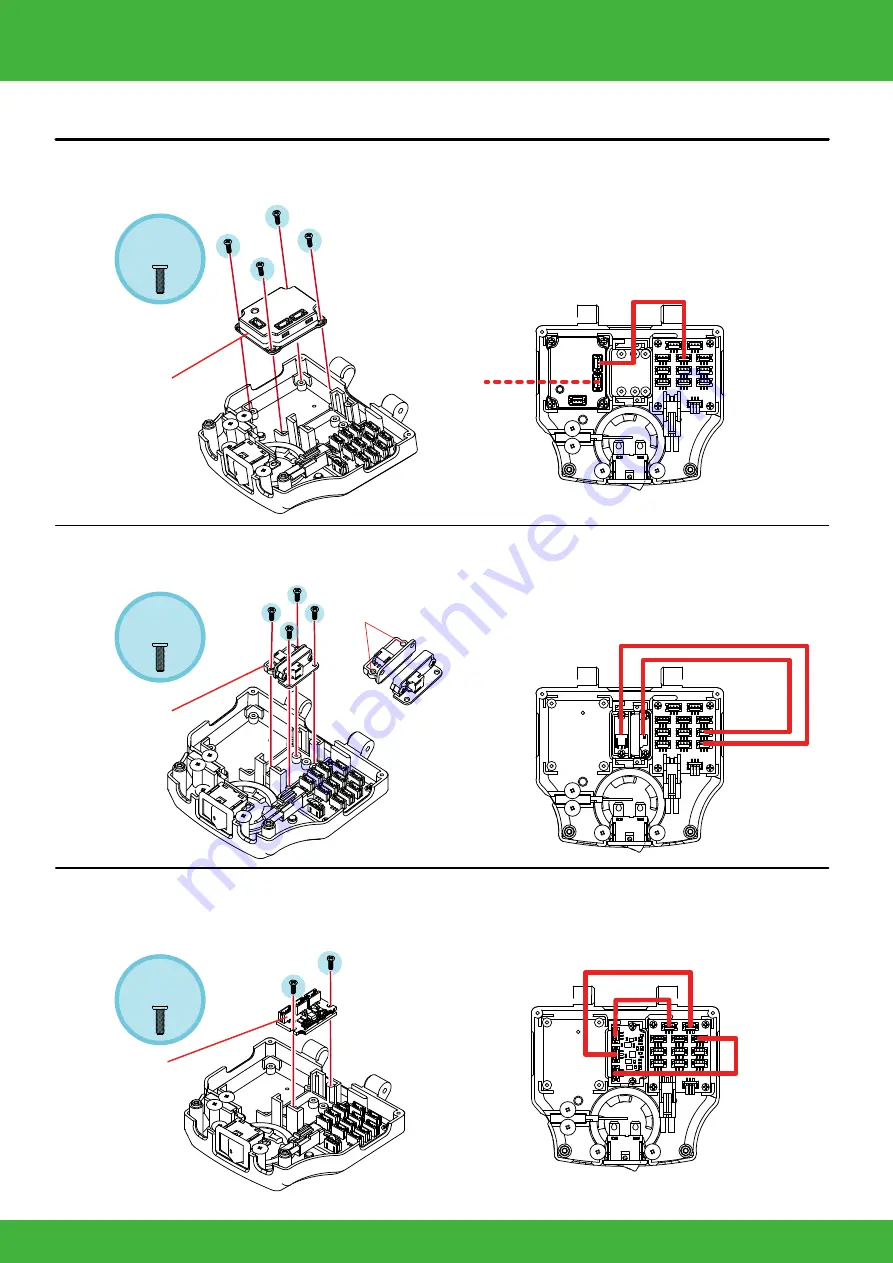
KRR-5FH : Receiver for wireless controller
Enables wireless operations with KRC-5FH.
KRR-5FH
KRG-4 x 2
RAS-3
Example:
Robot movements are stabilized by correcting postural changes.
Must be one pair
Used to determine the robot s posture by
detecting the tilt of its body.
KRG-4:Gyro sensor
RAS-3:3 Axis Accelerometer
(to Servo)
to SIO 7
to AD1
to AD3
to AD4
to AD5
to AD2
Connect KRR-5FH to the RCB-4mini s SIO port.
*The sample motion uses the port in the diagram.
If a servo is connected, remove it and connect it
to the KRR-5FH port.
It does not matter which of KRR-5FH s SIO ports is
used; it has no impact on operations. Also, daisy chain
connection is possible just as with servos.
Example:
Connect KRG-4 and the RCB-4mini AD port.
*The sample motion uses the port in the diagram.
*Please refer each manuals.
Example:
Connect the RAS-3 and RCB-4 mini s AD port.
*The sample motion uses the port in the diagram.
Front-back determined with AD4 (Z axis). (KXR-L2)
Remove the screw and nut
from one of the two units.
■
Method for Mounting on Backpack
X
Z
Y
Method for Mounting on Backpack
Содержание KXR-R4LL
Страница 28: ...28 Body Assembly 2 Joining Body Attach all four areas 200mm x4 KXR R4LL...
Страница 31: ...31 Attach the cable 120mm 120mm Wheel Leg Assemble 4 sets Wheel leg KXR R4LL...
Страница 37: ...37 Complete Assembly completed The following will explain how to mount the battery and run motions KXR R4LL...
Страница 60: ......





































































